Особенности изготовления робота-пылесоса дома
Теоретические аспекты
Чтобы успешно изготовить робот-пылесос своими руками, необходимо понимать суть его работы изнутри. Давайте рассмотрим несколько правил, соблюдение которых обеспечит правильное функционирование техники:
- Робот должен иметь форму шайбы, диска для правильного хода движения;
- Колесики размещаются по диаметру пылесоса, чтобы он мог осуществлять развороты;
- Центр тяжести наиболее оптимален на колёсах, но может находиться и рядом с ними;
- Средняя скорость аппарата 25–35 см/сек;
- Контактный бампер размером минимум 0,5 от окружности — обязательная составляющая робота-пылесоса;
- Зарядка самодельного роботы должны выполняться от зарядного устройства, нет необходимости в разборке аппарата;
- Пыль и мусор должна собираться в отдельную ёмкость, которую можно вынуть и прочистить.
Как сделать чертёж
Совет! отметьте на чертеже все составляющего будущего пылесоса и их примерными габаритами. Стрелками укажите направления воздуха и засасывания частиц пыли. Наглядность — один из шагов к успеху будущей сборки.
Для составления схемы давайте определимся, какие составляющие понадобятся в работе:
- Плата Arduino — «головной мозг» будущего робота;
- Турбина от старого пылесоса;
- Двигатель маленького размера (можно взять старый компьютерный кулер);
- Дальномеры — 2 штуки;
- Колёса (желательно 2 обычных и 1 поворотное), двигатели с редукторами;
- Контроллер (для двигателя);
- 3 литиевых аккумулятора;
- Контроллер заряда;
- Провода;
- Плотный картон.
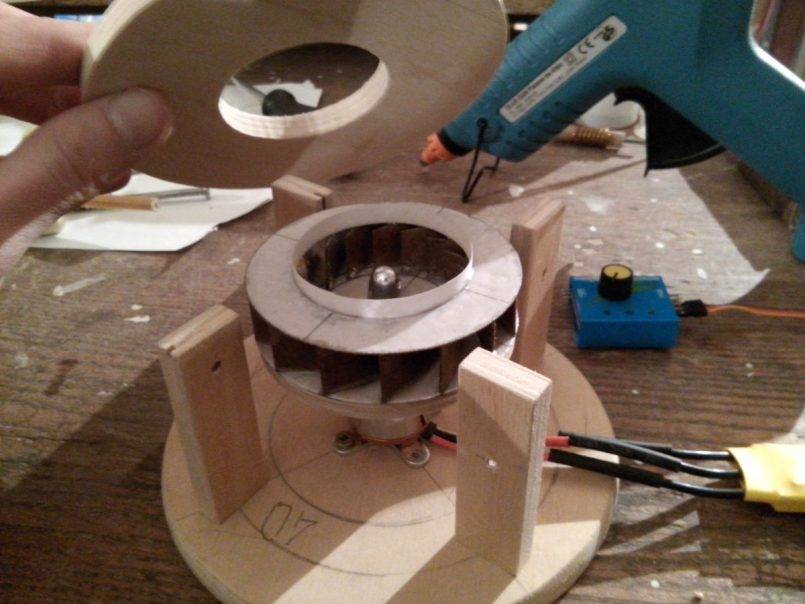
Важно! Если не сможете найти старую турбину — её можно сделать самому из плотного картона. Схема прилагается
Особенности проведения сборки
Затем двигатель нужно соединить с Arduino. Из картона сделайте круг, затем присоедините к нему колёса (диаметр рассчитывайте под «начинку» — около 30–35 см). С двух сторон используйте обычные колёса, но с угловыми редукторами, а между ними сзади — поворачивающееся колесо для манёвренности.
На изготовленное основание вмонтируйте всю электронику и блок пылесоса. Дальномеры прикрепляем спереди.
Дальнейшим шагом необходимо соорудить турбину, поэтому лопасти компьютерного кулера убираем и приклеиваем в него на термоклей турбину от старого пылесоса. Закрепляйте её точно по центру: нам не нужен дисбаланс.
Боковые стенки пылесоса можете соорудить самостоятельно. Главное, не забывайте: он должен иметь цилиндрическую форму.
Инфракрасный датчик для обнаружения лестниц
Для того, чтобы наш робот-пылесос мог обнаруживать лестницы и не падать с них, мы будем использовать инфракрасный датчик (IR Sensor). Принцип его действия достаточно прост – он содержит в своем составе излучающий инфракрасный диод (IR LED) и фотодиод. Излучающий инфракрасный диод излучает инфракрасный свет и если на его пути встречается препятствие, то он отражается от него и улавливается (принимается) фотодиодом. Но напряжение на выходе фотодиода достаточно мало, поэтому для его усиления до необходимого уровня в составе датчика содержится компаратор на основе операционного усилителя.
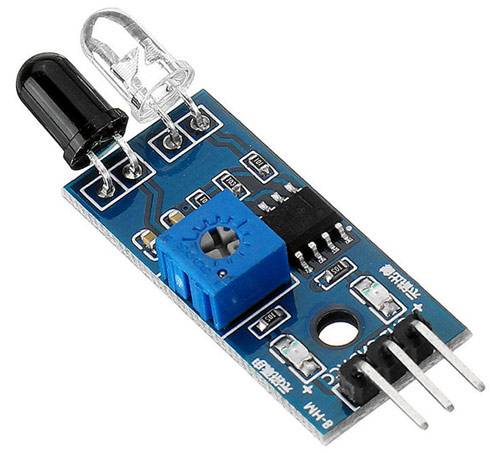
Инфракрасный датчик содержит 3 контакта – Vcc (питающее напряжение), ground (общий провод, земля) и output (выход). Когда вблизи датчика есть препятствие, то на его выходе формируется напряжение низкого уровня (low). Поэтому данный датчик мы можем использовать для обнаружения пола комнаты. Если он передвигается по полу, то на выходе датчика будет low. Если же на выходе датчика мы неожиданно обнаружим напряжение высокого уровня, то мы должны либо остановить робота, либо двигать его в обратном направлении, либо сделать что-либо другое чтобы предотвратить его падение с лестницы.
Чем отличается строительный пылесос от обычного
Но для работ от случая к случаю, данную конструкцию можно немного доработать и усовершенствовать. Идея принадлежит Шайтеру Андрею.
Прежде чем мы рассмотрим второй вариант конструкции, задайте себе вопрос: «В чем заключается одно из основных отличий бытовых пылесосов от строительных?»
В бытовых моделях охлаждение происходит за счет всасываемого воздуха.

То есть, вы пылесосите пол, воздух засасывает мусор. Далее происходит его фильтрация и охлаждение самого двигателя. После чего воздух выбрасывается наружу.
Отсюда и вытекает весь риск повреждения двигателя. Во-первых, при забивании фильтра, резко спадает охлаждение движка.
Во-вторых, цементная пыль на 100% не задерживается в пылесборнике, и часть ее летит через обмотки, по пути снимая как наждак лаковую изоляцию. Такая дисперсная пыль убивает все трущееся и крутящееся.

Добавление воды на дно бачка не особо помогает. Вместо пыли вы получите много грязи, тяжесть ведра, а фильтра все равно в итоге забьются.








В профессиональных же девайсах охлаждение двигателя осуществляется отдельно, через специальные технологические отверстия. Поэтому им не так страшны забитые напрочь мусором мешки.

Более того, у них еще предусмотрена автоматическая очистка или встряхивание.

Дабы по уму переделать бытовую модель, вам понадобится немного больше запчастей, чем в первом случае.
«Очумелые ручки» на Robohunter: как собрать робот-пылесос своими руками
Уборка в доме – вещь необходимая, но утомительная, поэтому робот-пылесос стал топом продаж и держится в нём долгое время, облегчив жизнь многим людям.
Правда, незаменимый помощник – дорогое удовольствие. Поэтому находчивые инженеры собирают роботы-пылесосы самостоятельно, причём оснащают их дополнительными функциями и апгрейдят дизайн.
Для тех, кому лень убирать в квартире, но не лень собрать робот-пылесос своими руками, мы подготовили подробную инструкцию для этого.
Необходимые материалы
- гофрированный картон из-под старого пылесоса, ведь он вам больше не понадобится;
- линейка и маркер – семь раз отмерять и прочертить;
- канцелярский нож, ножницы и клей – один раз отрезать и многократно склеить;
- лист фетра – щетина щётки, способной собрать 99,9% пыли и мусора в вашем доме;
- китайская палочка – ось той самой щётки;
- кнопка «вкл./выкл.» из-под настольной лампы – она будет включать устройство (лампу придётся принести в жертву богам чистоты и робототехники);
- мотор-редуктор Arduino с проводами питания – чтобы щётка вращалась самостоятельно, а не с помощью ваших рук;
- аккумулятор или батарейка «Крона», которая придаст сил мотору-редуктору вращать щётку;
- крышечки из-под пластиковых бутылок Coca-Cola/Fanta/Sprite или любого другого любимого напитка (8 шт.) – нет, это не акция, а способ передвижения робота-пылесоса;
- обёрточная бумага, фломастеры, краски и т. д. – для нестандартных дизайнерских решений.
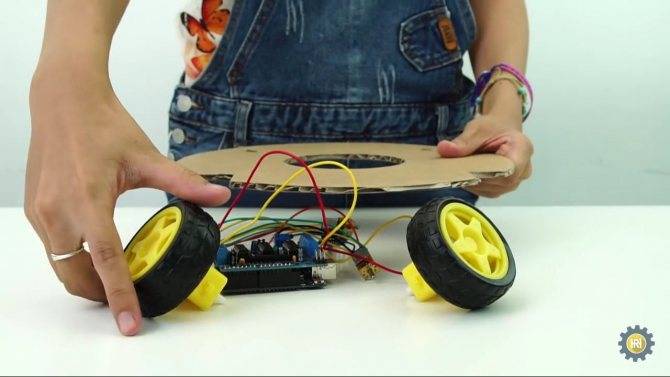
Собираем робот-пылесос. Home Edition
Итак, если все материалы у вас под рукой, пора приступить к сборке робота-пылесоса. Перед началом рекомендуем посмотреть данное видео: в нём наглядно демонстрируется процесс.
А теперь пропишем все этапы для большей ясности.
1. Берём картон и чертим линии изгиба и прорезки согласно размерам, указанным в видеоролике.
2. Сгибаем и режем. Поздравляем – основа робота-пылесоса готова!
3. Берём лист фетра и нарезаем короткими полосками. Нужно постараться сделать их одинакового размера. Собираем их в кучу и откладываем в сторону, но недалеко.
4. Срезаем острый край китайской палочки, тем самым превращаем её в обычную палочку. Точнее, в ось вращения щётки пылесоса.
5. Возвращаемся к куче нарезанных кусочков фетра и аккуратно наклеиваем их по одной к полученной оси.
6. Делаем неглубокое отверстие в одном конце оси.
7. Берём мотор-редуктор, смазываем остриё клеем и вставляем его в проделанное отверстие в бывшей китайской палочке.
8. Поздравляем ещё раз – щётка готова! Аккуратно покрываем клеем микросхему и прикрепляем её к картонной основе.
9. С помощью на всякий случай приготовленной витой пары соединяем провода питания мотора с кнопкой включения и батарейкой. Кладём это в специальный отсек, как показано на видео.
Итак, мы можем поздравить вас в третий раз, так как робот-пылесос фактически готов! Осталось приделать ему колёсики и украсить по своему желанию.
Для колёсиков понадобятся крышки из-под напитков. Сделать из них колёса очень просто: две крышки – одно колесо. Просто склеиваем их вместе и получаем вращающийся элемент. В центре крышек-колёс нужно сделать отверстие и продеть туда заготовленные гвоздики, а затем прикрепить их к конструкции. Этот этап также показан на видео.





Осталось украсить вашего помощника. Здесь вместо инструкции вы получите от нас лишь напутственное слово: просто дайте полёт вашей фантазии! Робот в стиле hi-tech, с логотипом Samsung или со щенячьими глазами? Отлично! Ведь это ваш персональный помощник для уборки дома!
P. S. Мы не уверены, что после прочтения статьи вы таки соберете свой робот-пылесос. Но мы надеемся, что вы получили массу позитивных эмоций. Однако если задаться целью, у вас непременно получится сконструировать реального сверхмощного уничтожителя любого вида грязи – ведь модель из видео действительно работает.
Сборка робота-пылесоса
Подготовив все необходимое можно приступать к сборке. Она заключается в прохождении вышеописанных этапов.
- Создаем корпус цилиндрической формы из картона либо поливинилхлорида: диаметр – 30 см, высота – 9 см, толщина стенок – 0,6 см. Дно лучше вырезать из фанеры.
Закрепляем на корпусе поливинилхлоридный бампер при помощи скотча, предварительно установив в него датчики инфракрасные и реагирующие на удар.
- Изготавливаем из картона или поливинилхлорида отсек для мусора с крышкой, закрепляемой магнитами.
- Делаем фильтр из тканевых салфеток.
- Делаем турбину из поливинилхлорида и компьютерных дисков, устанавливаем.
- Подключаем датчики к контроллеру: обычный рабочий режим соответствует логической единице, а срабатывание – нулю.
- Двигатель передней щетки подключаем к arduino mega 2560 через транзистор mosfet, что обеспечивает быстрое ее вращение по углам и довольно медленное по основной площади комнаты.
- Устанавливаем 4 аккумулятора (соединяем их попарно, каждую пару — последовательно) и зарядное устройство, подключаем их.
Монтируем щетки, изготовленные самостоятельно из лески, и колеса (купленные либо снятые с подходящей игрушки) на дно.
- Устанавливаем на arduino необходимые программы при помощи компьютера, которые можно найти в сети интернет.
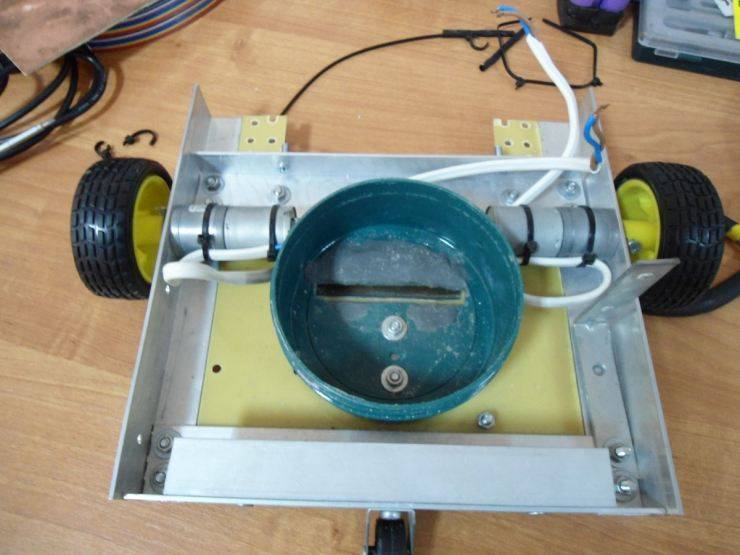
- Проверяем закрепление всех компонентов к дну и стенкам корпуса.
- Вырезаем из картона или поливинилхлорида крышку, закрепляем ее саморезами.
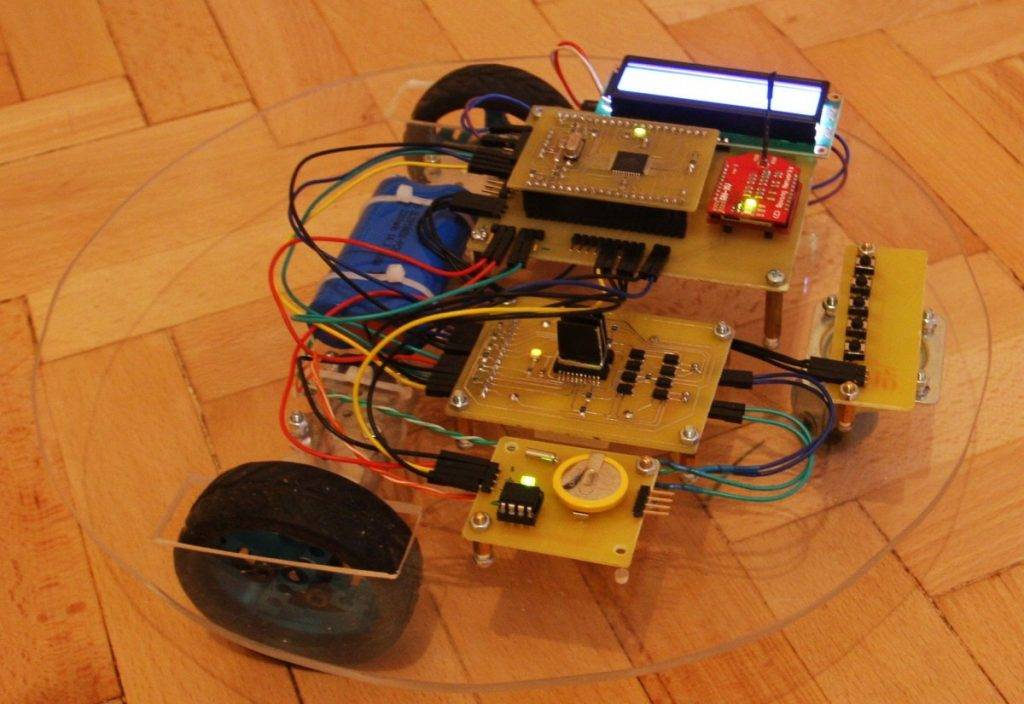
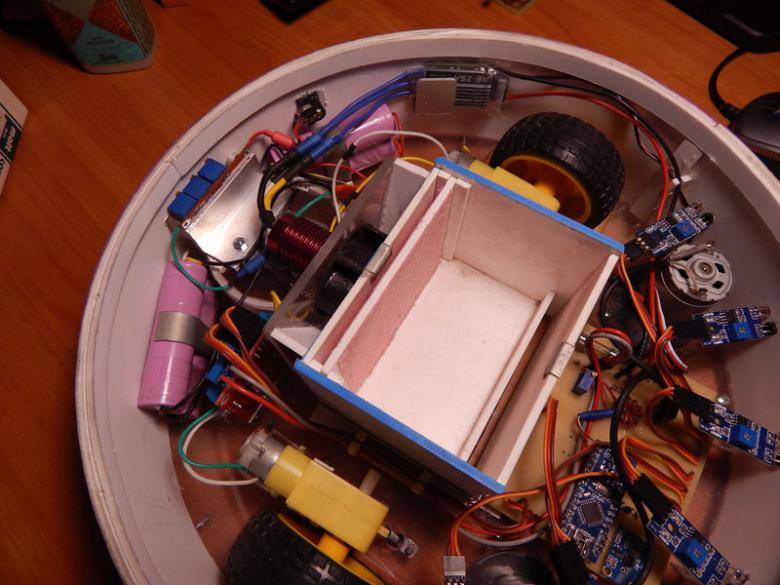
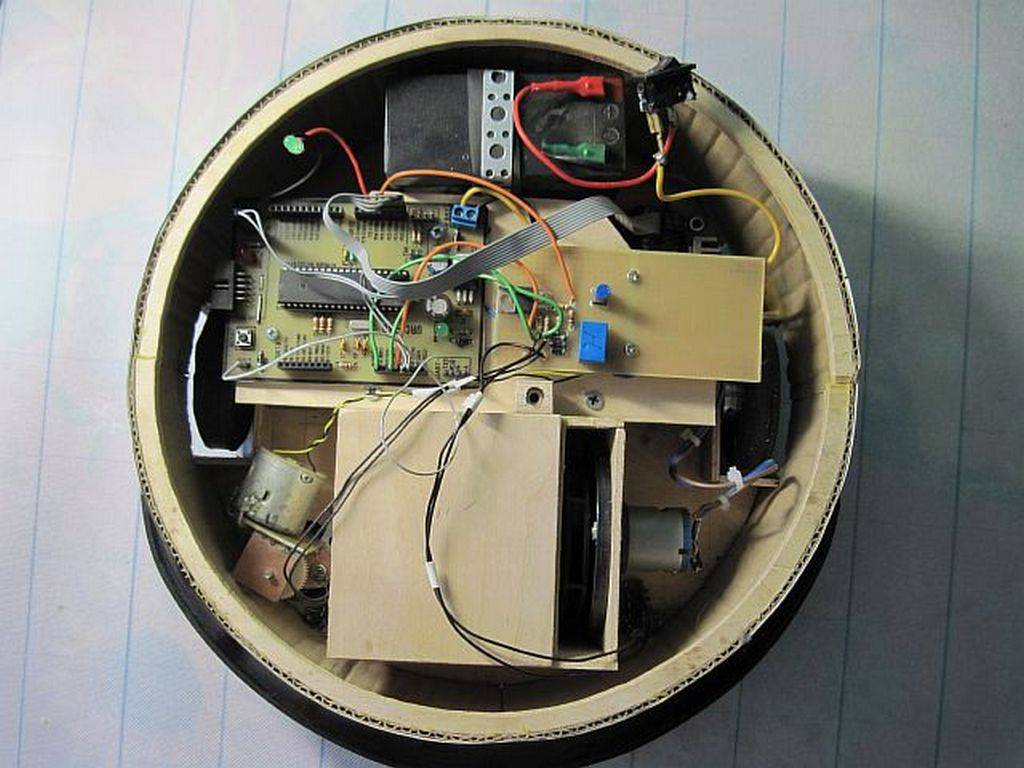
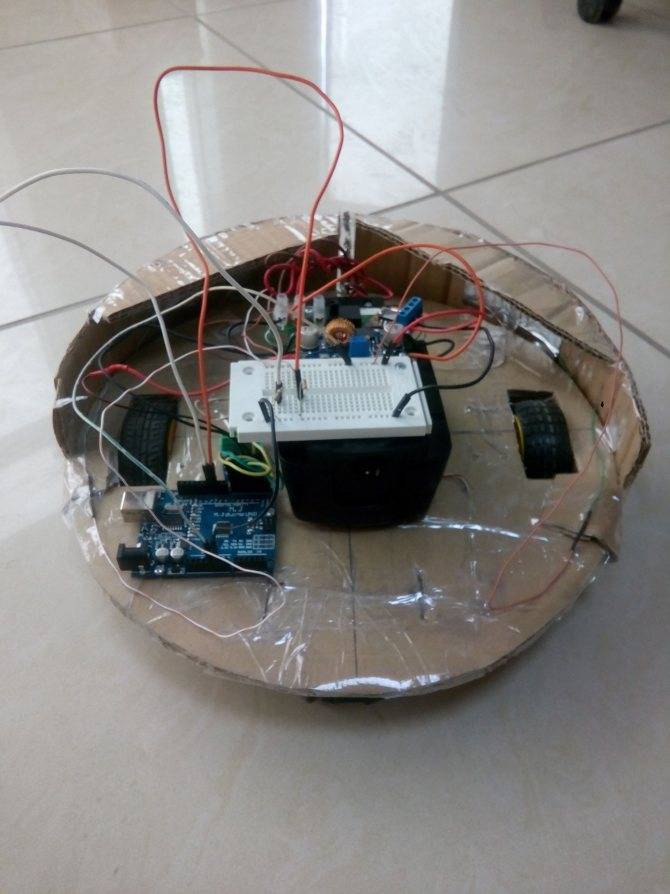
Все детали закрепляются на имеющиеся для этих целей у них разъемы саморезами либо клеем, скотчем. Полученный результат представлен на фотографии:

Как сделать микроволновку для куклы своими руками?
 Принятие пищи в кукольном мире занимает не самое последнее место. Кукла должна где-то готовить и разогревать свою кукольную еду из пластилина или полимерной глины.
Принятие пищи в кукольном мире занимает не самое последнее место. Кукла должна где-то готовить и разогревать свою кукольную еду из пластилина или полимерной глины.
Очень удобная и многофункциональная микроволновка для куклы может получиться из обычной точилки. Выбирайте точилки, в которых есть отделение для сбора опилок. Используя декоративную клейкую бумагу оклейте точилку в нужный вам цвет – белый, черный или металлический (для более реалистичного внешнего вида).
 Кнопочки можно сделать из обычного пластилина или же приклеить бусинки, ненужные детальки от сломанных ручек или фломастеров.
Кнопочки можно сделать из обычного пластилина или же приклеить бусинки, ненужные детальки от сломанных ручек или фломастеров.
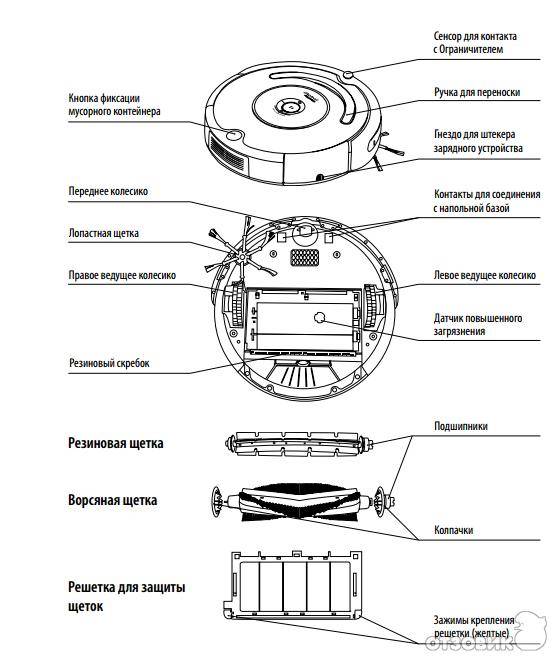
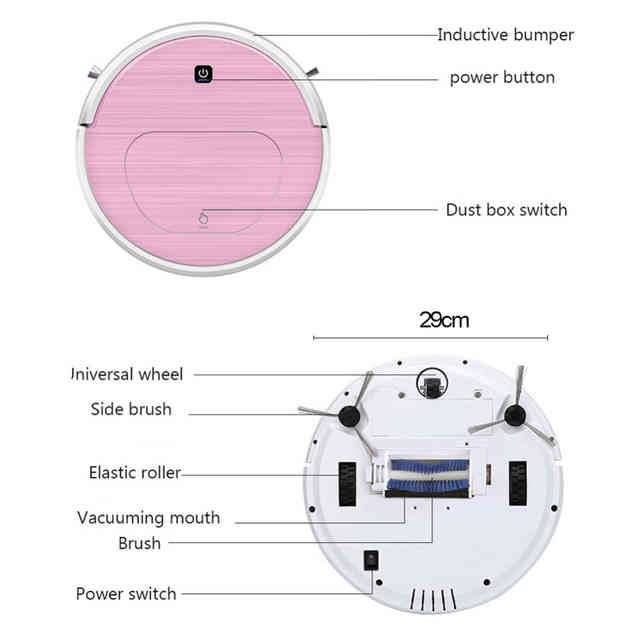
Устройство робота-пылесоса
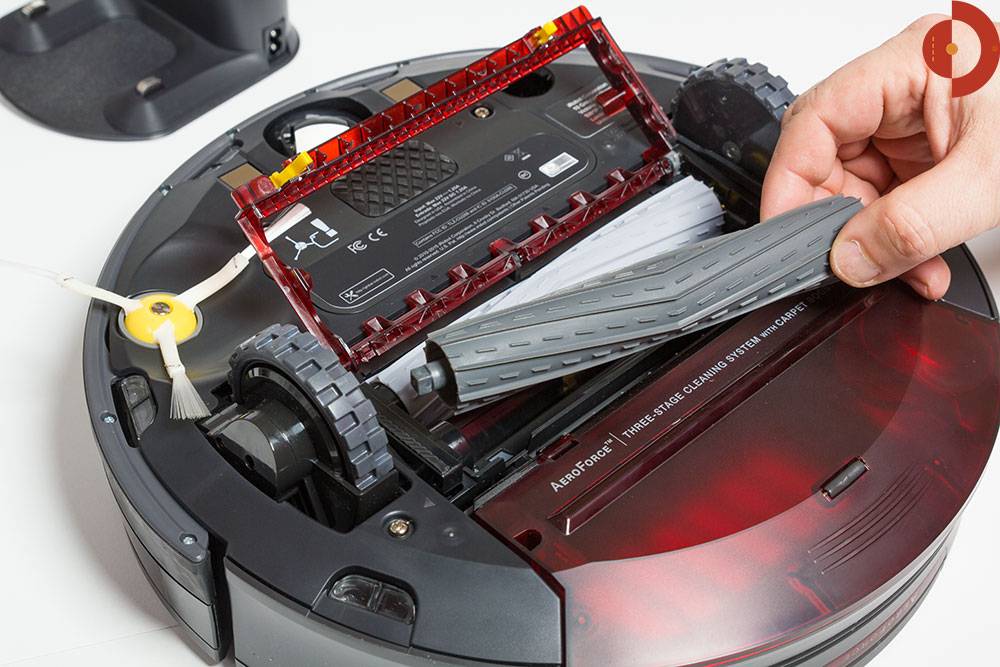
Щетки
Важнейшим элементом робота пылесоса являются щетки. Как правило, в современных автоматических уборщиках установлены два вида щеток: основные и боковые. У пылесоса может быть одна или две основные щетки. Щетки двигаются по направлению друг к другу и собирают загрязнения. Боковые щетки находятся на нижнем краю устройства. Они отвечают за уборку в углах, а также вдоль плинтуса.
При выборе робота-пылесоса стоит обратить внимание на материал, из которого сделаны щетки. Щетки из жесткого ворса прослужат вам намного дольше, чем щетки из лески
Пылесборник
Находится внутри пылесоса. Объемы пылесборника могут варьироваться от минимальных и до 1 л. Пылесосы с маленьким пылесборником подойдут для уборки не больших помещений, в которых нет животных. Если площадь вашего жилья более 40 кв. м. и в квартире есть домашние животные, то лучше выбирать пылесос с более объемным пылесборником.
Аккумулятор
Как правило, роботы-пылесосы оснащены следующими типами аккумуляторов: никель-металлогидридные и литий-ионные. Последний тип аккумуляторов считается более долговечным, прибор с таким аккумулятором может работать до 3 часов от одной зарядки.
Датчики
Помогают пылесосу ориентироваться в доме. Датчики могут быть трех видов: инфракрасные, ультразвуковые, лазерные. Чем выше стоимость аппарата, тем большее количество датчиков он имеет.
А сами-то вы пробовали такой пылесос?
Конечно! Для тест-драйва мы выбрали советскую квартиру, в которой до этого очень давно не убирались. Робот-пылесос ECOVACS T8 AIVI два дня очищал ее от пыли, мыл полы и знакомился с интерьерами. Результат отличный — ему удалось собрать пыль из-под всей мебели и труднодоступных углов и даже отмыть несколько серьезных пятен на плитке в ванной. При встрече с ковровым покрытием робот автоматически увеличивал мощность. Работал он самостоятельно и достаточно тихо, так что можно было подготовить этот материал прямо во время уборки. Иногда пылесос путался в связках проводов под столом, но в большинстве случаев благополучно выбирался из них самостоятельно. В самых сложных ситуациях он прерывал работу и честно просил о помощи. Но помощь с его стороны была гораздо больше — на такую же тщательную уборку вручную ушло бы в разы больше времени.
Что понадобится для изготовления самодельного устройства
Чтобы сделать робот-пылесос ничуть не хуже (но дешевле) заводского, нужно не так много. Одна из аматорских конструкций пылесоса собрана из упаковочного гофрокартона, который применяется для упаковки грузов. Из него же делают коробки. Но для нормального эстетического впечатления необходимо нечто большее. Это может быть склеенный из пластика корпус пылесоса или готовый элемент, позаимствованный от пришедшего в негодность заводского робота-помощника.
Итак, что будет нужно в первую очередь:
- Микроконтроллер Arduino.
- Макетная плата.
- Дальномеры.
- Устройство управления двигателями.
- Моторы.
- Колеса.
- Кулер от компьютера.
- Турбина.
- Аккумуляторы типоразмера 18650.
- Провод.
Это минимальный вариант комплектации пылесоса. В дальнейшем роботокомплекс пылесоса допускается модернизировать, адаптировать под конкретную ситуацию.
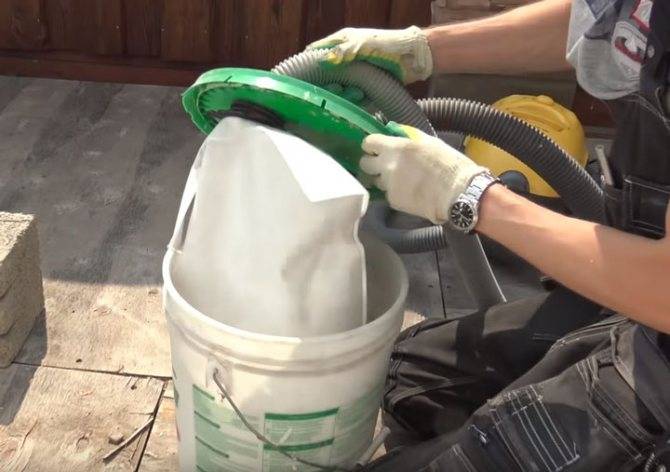
Строительный пылесос с водяным фильтром
Перед тем как сделать пылесос с водяным фильтром, необходимо разобраться, как работает этот тип фильтрационного элемента.
Принцип действия заключается в том, что воздушный поток с пылью вращается по спирали и касается водной глади. Вода заливается предварительно в пылесборник. То есть получается, что система работает не только по технологии сбора мусора с помощью циклона, но и дополнительно по принципу увлажнения воздуха, отчего пыль становится тяжелой и оседает на дно емкости в воду.






Здесь также можно обойтись обычным пластиковым ведром. Но необходимо изменить место соединения шланга с насадкой. Если в предыдущем варианте это была боковая плоскость емкости, то в этом это будет крышка ближе к краю. На фото ниже это хорошо видно.
В первое отверстие, расположенное посередине, вставляется шланг от бытового пылесоса. Во второе – сначала трубный отвод, который будет направлять воздух по внутренней стенке ведра, а к нему подключается шланг с насадкой. С обратной стороны крышки это будет выглядеть так:
Перед началом работы внутрь емкости заливается вода, чуть ниже середины высоты ведра.
Датчики управления

Робот-пылесос представляет собой технику для умного дома, обладает встроенным искусственным интеллектом. Обычно датчики располагают на бампере для лучшей управляемости техники. С помощью датчиков ИК-типа, робот определяет препятствия и не касается их. Они установлены по площади бампера, но есть не на всем корпусе, поэтому, если пылесос наезжает на препятствие под углом, робот может коснуться его поверхностью, но тут же отъедет. Тогда сработает механический датчик удара. В зависимости от алгоритма движения после удара, пылесос поменяет свое направление. В некоторых моделях также есть еще один датчик, который расположен на верху бампера. Он необходим для того, чтобы робот мог проехать под мебелью и не застрять.
Покупать или сделать самому?
Робот, выполняющий функции пылесоса, может быть изготовлен своими руками. Процесс сборки известен очень хорошо, поэтому не вызывает никаких сложностей. Все определяется свободным временем, умением и наличием инструментов. Стоимость собранного собственноручно робота будет значительно ниже, чем у заводской модели, что и является основным преимуществом. Во время сборки можно узнать принцип работы и составные элементы робота, поэтому в случае его поломки восстановить работоспособность будет не сложно.
Покупка устройства интересна большинству сограждан. Подобный вариант экономит время, а также позволяет получить бота с дополнительными опциями и умениями. Но стоимость готовых моделей обычно довольно высока, поэтому позволить их себе может не каждый человек.
Принцип работы робота пылесоса
Сенсоры умного уборщика сканируют пространство вокруг себя, посылая сигналы до 65 раз за одну секунду. Зарегистрированную сенсорами информацию обрабатывает процессор и в соответствии с показателями дает указание уборщику, как вести себя прямо сейчас и в последующие секунды, если поступающая информация не изменится. Алгоритм поведения робота-уборщика в классическом варианте проявляется так:
- Устройство от базы приезжает в центр комнаты.
- По спирали он движется от центра.
- Если на пути следование есть препятствие, он старается обойти его вдоль.
- Точно так же он поступит и со следующим препятствием, постарается двигаться вдоль него.
- Движения будут происходить до того момента, пока в процессор не поступит сигнал о низком заряде аккумулятора. Тогда гаджет оставит на время свои дела и направится к док-станции для подзарядки.
Процесс уборки
Есть несколько основных этапов, по которым помощник делает свою работу. Эти системы скрыты от взора человека:
- Сбор данных. Включившись, робот сканирует лазерами комнату, узнает ее размеры, определяет изначальное месторасположение мебели и других препятствий.
- На основе полученных данных составляется карта перемещения и формируется маршрут. Это может быть прямая линия (от стенки до стенки) или при глубоком изучении спиралевидные движения от центра комнаты.
- Запуск системы щеток для сгребания мусора, всасывание его к мусороприемнику и движение по назначенному маршруту.
Процесс уборки можно наглядно увидеть, умостившись на диване и понаблюдав за трудягой минут 5-10. Устройство с уверенностью движется по сформированному маршруту, щетки по бокам захватывают весь мусор к центру прибора, турбина вытягивает воздушным потоком частички грязи, пыли, шерсть и волосы в мусоросборник.
При достижении стены или ступенек устройство тут же меняет курс, чтобы ненароком не потерять плоскую поверхность из-под колес.
Возвращение на базу для подзарядки
Завершающий этап – возвращение на базу при окончании уборки или для дополнительной подзарядки, с последующим выездом на место уборки.
Док-станция оснащена катушками индуктивности, которые заряжают аккумулятор пылесоса без проводов. Чтобы роботизированное устройство быстро отыскало базу, док-станция оснащается специальным ИК-маяком. На этот маяк и движется гаджет.
Если прибор имеет программное обеспечение поновее, то с помощью лазерных сенсоров робот-пылесос попросту запоминает размещение док-станции и помечает ее на своей виртуальной карте помещения.
Дополнительная комплектация
Некоторые умные помощники могут доукомплектовываться:
- Центральной турбощеткой, которая позволит вращаться двум независимым щеткам друг дружке навстречу, обеспечив более качественный захват мусора.
- Дополнительной щёткой еще сбоку для расширения области захвата мусора за один маршрут.
- Фильтро-элементами, например, очистка воздуха от бактерий, грибков, споров, плесени, пыльцы растений и прочего.
- Датчиками грязи для определения особо грязных местах на полу, где требуется более тщательная очистка.
Досье
Главное предназначение этого типа промышленных агрегатов – борьба с аллергенными загрязнениями: пылью, металлической стружкой, осколками стекла или плитки. Они отличаются от бытовых аналогов скоростью всасывания и производительностью.
Корпус изделия изготовлен из высококачественной противоударной стали с покрытием защитной краской. Колесики из вспененной резины позволяют прибору свободно перемещаться по любой поверхности. Техника оснащена многофункциональными системами, которые отвечают за сбор пыли, фильтрацию воздуха и дополнительные опции, предусмотренные производителем.

Отдельное слово необходимо сказать о главных функциональных элементах пылесоса. Все они изготовлены из стойких материалов, поэтому мелкодисперсная пыль или стружка не нанесут вреда прибору. Сердцем профессиональной техники является мотор, мощность которого значительно превышает параметры привычных для нас моделей. Сильный двигатель позволяет продлить срок безостановочной работы агрегата и увеличивает скорость всасывания строительного мусора.
Рабочий вариант строительного пылесоса из бытового
Главный дополнительный элемент здесь — фильтр мешок из нетканого материала. Очень хорошо подходят экземпляры от фирмы Керхер — артикул 2.863-006.0

Вообще-то этот фильтр одноразовый. Ваша задача сделать из него многоразовый элемент.






Для этого разрезаете его нижнюю часть и немного складываете ее, чуток уменьшая ширину (до 22см).

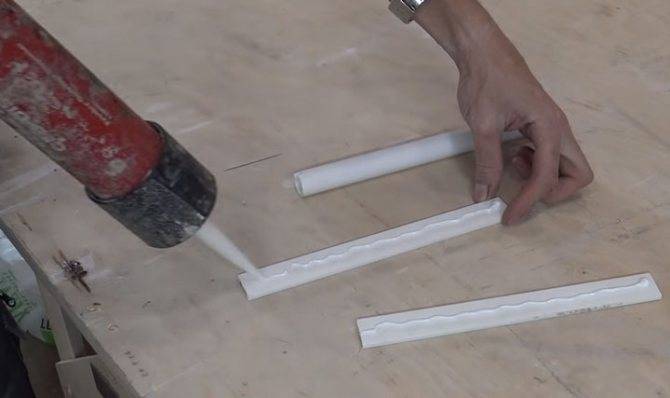
Далее эту нижнюю часть нужно закрыть специальной закрывашкой. Изготавливаете ее из двух элементов пластикового кабельного канала и куска полипропиленовой трубы.

Трубку распиливаете вдоль, с шириной прорези примерно в 5мм.
Далее все просто. Намазываете клеем крышки.
Прикладываете их тыльной стороной к ткани в нижней части.

После чего вдеваете через прорезь подготовленную трубку.

В итоге из одноразового у вас получился многоразовый фильтр мешок. Причем гораздо большего размера чем тот, что установлен внутри бытовой модели.

Далее проделываете уже ранее рассмотренные этапы по модернизации ведра. В крышке просверливаете отверстия и вставляете в них резиновые гофропереходники.

Одно будет для подсоединения фильтр-мешка, другое — для шланга.Размеры подбирайте по диаметрам своих девайсов.
Здесь можно обойтись без фановых труб и уголков. Далее одеваете пластиковую вставку от многоразового фильтра на переходник.

Осталось плотно закрыть крышку на ведре. Конструкция готова к работе.
Она хоть и похожа, но отличается от вышеприведенного первого варианта. После того как вы включите агрегат и начнете засасывать мусор, именно самодельный многоразовый пылесборник и будет собирать в себе всю гадость и грязь.

Пыль не будет летать вокруг как в предыдущем случае. Наоборот, данный мешок от потока воздуха будет раздуваться внутри ведра.
Постепенно он будет заполняться как тяжелыми, так и мелкими фракциями, которые могли быть пропущены циклоном.
Однако не забывайте про забивание стенок у многоразового фильтра и уменьшение тяги охлаждающего потока воздуха. Чтобы не спалить двигатель бытового пылесоса, необходимо осуществить еще одно мероприятие.






Подготовка к практической реализации проекта
Рассмотрим применение вышеизложенных принципов на базе платформы Arduino Mega 2560. Процесс создания будет состоять из нескольких этапов:
- подготовка инструментов и материалов;
- изготовление корпуса с колесами и отделом под мусор, пылесборника и турбины;
- монтаж датчиков и микроконтроллера, моторов с редукторами, аккумулятора, щеток;
- выполнение электрических подключений;
- введение программы в Arduino, определение согласованности датчиков;
- проверка работоспособности робота-пылесоса и его способности заряжаться самостоятельно.
Идея реализуется с помощью следующих материалов и инструментов:
- контроллер Arduino – 1 шт, с драйверами;
- лист фанеры (либо плотный картон) – 1 м.кв;
- колеса – 3 шт;
- провод сечением не более 0,75 мм.кв (подойдет витая пара) – около 2 м;
- блок питания – 4 аккумулятора по 18 V, индикатор заряда к ним, зарядное устройство;
- инфракрасные датчики – 4 шт, контактные – 2 шт;
- электродвигатели: для турбины – 1 шт, вращающий щетку – 1 шт, 2 мотора с редуктором обеспечивают передвижение;
- поливинилхлоридный корпус – 1 шт;
- клей – 1 упаковка, саморезы – 10 шт, скотч – 1 шт, набор магнитов;
- набор отверток и сверл, плоскогубцы, нож канцелярский, карандаш, линейка, шуруповерт, электролобзик.
Теоретические аспекты проблемы
Домашние умельцы вывели практическим путем требования к роботам-пылесосам, которых следует придерживаться при их создании. Результатом соблюдения будет механизм, пригодный к дальнейшей эксплуатации. Перечень основных правил следующий:
- рекомендуется изготавливать робот в форме небольшого цилиндра;
- для того, чтобы автомат мог осуществлять развороты на месте – колеса следует размещать по диаметру;
- дополнительному рулевому колесу привод не требуется;
- механизм должен собирать мусор в легко вынимаемый мусороприемник;
- робот обязательно должен быть оснащен контактным бампером, занимающим минимум половину его окружности;
- зарядку аппарата следует проводить от зарядного устройства, без его разборки;
- наилучшим местом размещения центра тяжести у робота являются колеса, также допускается располагать его рядом с ними;
- оптимальная скорость движения – от 25 до 35 см/с;
- двигатели работают совместно с редукторами, оснащенными пружинами.
Выделяются модели с шаговыми двигателями, что позволяет программно управлять ими без применения редукторов.
Что пригодится для сборки?
Перед тем как самостоятельно изготовить автоматизированную технику следует обзавестись всеми нужными материалами и схемой сборки. В интернете есть достаточно много видео, обучающее робототехники. Рассмотрим подробнее список необходимых материалов, и как все-таки собрать агрегат самостоятельно.
Материалы необходимые для самостоятельной сборки пылесоса:
- мозг системы;
- 4 ИК, для обнаружения препятствий на воем пути;
- 2-3 вращающих аксессуара;
- переключатели, которые необходимы для изменения траектории движения во время столкновения;
- модель для контроля движения передней щетки;
- преобразователь тока;
- драйвер моторов;
- мотор, отвечающий за вращение щетки;
- редуктор;
- Li ion блок;
- изготовленный корпус робота;
- основание из фанеры;
- несколько магнитов, обеспечивающих крепление;
- клей, саморезы;
- провода, переключатели, кабели и т.д.
Схема
Для того, чтобы сделать робот, который ничем не будет отличаться от промышленной модели. Процесс программирования производится через ПК, следует загрузить код на плату. Существует большое множество различных планов роботизированной модели. Схема робота пылесоса:
- Берем основание из фанеры, к нему крепим с помощью клея — двигатель, пылесборник, кулер, микросхема, аккумулятор, ИК лазеры передвижения. Стоит не забывать что у пылесборника должна быть трубка, позволяющая воздуху выйти наружу. Колеса решили взять уже готовые, то просто крепим к основанию.
- Установить бампер. Его можно сделать из металлического материла, главным критерием является воздействие контактного аксессуара на переключатель, заставляющий двигаться его назад, в противоположную сторону от препятствия.
- Далее устанавливаем корпус, следует заметить, что корпус крепится с помощью магнитов. Чем выше количество используемых магнитов, тем прочнее корпус будет держаться. Лучше всего подойдет корпус из поливинилхлорида.
Подробнее о процессе сборки
Теперь детально рассмотрим проект сборки:
- Корпус изготавливается из картона, либо поливинилхлорида.
- Закрепляем на корпусе ИК лазеры и контактный аксессуар;
- Пылесборник изготавливается из картона или поливинилхлорида;
- Для фильтра подойдут тканевые или микрофибровые салфетки;
- Двигатель подключается к ардуино;
- ИК аксессуары подключаются к контроллеру;
- Устанавливаются батареи;
- Устанавливаем щетки;
- Далее следует процесс программирование;
- Устанавливаем верхнюю крышку и проверяем целостность робота.
За и против
Стоит ли покупать робот-пылесос? Нужен ли он? Не будет ли покупка бесполезной тратой денег? Безусловно, на эти вопросы вы должны ответить себе сами.
Однако, мы напомним вам основные аргументы ЗА и ПРОТИВ покупки робота-пылесоса.
Аргументы ЗА:
- Экономит время. Особенно при наличии большой квартиры, которую необходимо долго убирать.
- Убирает не только пыль и грязь, но еще и шерсть домашних животных
- Возможность уборки в труднодоступных местах: под шкафами, столами, диванами
- Незаменимый помощник в уборке, если дома есть аллергики. Помогает всегда поддерживать квартиру в чистоте.
Аргументы ПРОТИВ:
- Высокая стоимость
- Могут возникнуть проблемы с сигнализацией, установленной в доме. Сигнализация может срабатывать в ответ на передвижения робота.
- Менее тщательная уборка в углах квартиры и труднодоступных для робота местах.
- Невозможность уборки пола под низко стоящей мебелью.
- Робот-пылесос не способен справиться с сильными загрязнениями: прилипшая к полу еда или напитки. Такие загрязнения все равно придется устранять в ходе влажной ручной уборки.
Тестирование
После сборки самодельной конструкции можно приступить к ее тестированию
На этом этапе уделяется внимание нижеприведенным моментам:
- Проводится запуск устройства. Для этого нужно провести полную зарядку применяемых аккумуляторов.
- Нужно проследить за передвижением устройства, оно должно обходить все препятствия на своем пути.
Если перед роботом-пылесосом возникла виртуальная стена, то нужно провести калибровку установленных датчиков. Для этого проводится загрузка требующихся драйверов и управляющей программы.
Промежуточный итог
Цель достигнута: пылесос разговаривает. Я рад, что не стал городить слишком много сразу всего. Следующий шаг связать распознавание образов с потоком, регулирующим движение, а также попробовать transfer learning.
Искусственный интеллект, тема настолько объемная, что сложно определить, за что взяться в первую очередь. На мой взгляд не существует единой точки входа. Совсем не обязательно начинать с вычисления сложных производных или курсов программирования на Python (хотя и то и другое безусловно полезно). Выбирайте то, что интересно лично вам, и да пребудет с вами сила довести начатое до конца.
P.S. Детали реализации лежат в репозитории. Комментарии и пулл реквесты приветствуются.