

Как сделать робот-пылесос?
Сейчас популярность роботизированных домашних уборщиков все возрастает с каждым днем. Это обосновано тем, что данные устройства способны поддерживать покрытия вашего пола в чистоте и при этом не отнимать у вас времени. Их главным отличием от управляемых человеком собратьев является то, что очистка поверхности, перемещение и ориентирование в пространстве осуществляются устройством самостоятельно. Этого удалось достичь благодаря наличию специальных датчиков, которые контролируют смену режима работы, перемещение и подзарядку пылесоса.
Основная проблема заключается в том, что приобрести робот-пылесос на рынке сейчас достаточно проблематично. Далеко не везде удается подобрать подходящую модель, да и ценовая политика некоторых реализаторов устраивает далеко не всех. Однако не стоит отчаиваться. У вас всегда есть возможность создать самодельный робот-пылесос. Само собой, сделать такое устройство своими руками и в домашних условиях — это весьма длительный процесс, который потребует терпения, определенного набора материалов и инструментов, а также навыков работы с подобного рода техникой. Схема создания робота-пылесоса в домашних условиях вполне постижима даже для любителя. Однако в процесс создания подобного рода механизмов необходимо вникнуть и выяснить все нюансы предстоящей операции. В противном случае вы лишь зря потратите время и средства.
Робот-пылесос своими руками
Описание самодельного робота пылесоса
Если вы все сделаете правильно, у вас получится модель, соответствующая этому описанию:
- диаметр устройства составляет 30 сантиметров, высота – 9 сантиметров. Корпус сделан из вспененного поливинилхлорида. При этом толщина самого корпуса достигает 6 миллиметров;
- в бампере установлены 4 датчика, посредством которых будет фиксироваться положение робота-пылесоса в пространстве. При этом имеется пара переключателей, подсоединенных на случай непредвиденных столкновений. Края обиты резиновой прокладкой, чтобы при случайном столкновении с мебелью не повредить ее;
- емкость для пыли и мусора изготовлена из поливинилхлорида толщиной в 4 миллиметра. Фильтр для пыли изготовлен из 2 обыкновенных тряпичных салфеток, которые можно купить в каком угодно бытовом магазине. Крышка, защищающая содержимое мусорного контейнера, прикреплена к основанию при помощи магнитов;
- турбина изготовлена из тонких пластиковых листов, фрагментов компьютерных дисков и поливинилхлорида;
- верхняя крышка устройства держится на суперклее;
- инфракрасные датчики имеют 4 выхода подключения к системе «Ардуино». При этом обычный режим работы подразумевает выдачу логической единицы, а ситуация, в которой хотя бы один из датчиков системы срабатывает — логический ноль;
- если ИК-датчик не сработал, а пылесос тем не менее наткнулся на какое-либо препятствие, его бампер нажмет на переключатель, что спровоцирует откат устройства на несколько сантиметров назад. После этого будет произведен разворот, а работа продолжится. Переключатели при этом нужны достаточно мощные, чтобы своевременно устанавливать бампер в исходное положение;
- мотор, отвечающий за движение передней щетки, подключается в Arduino через MOSFET. При этом в том случае, когда робот-пылесос находится в движении, щетка вращается достаточно медленно для того, чтобы пыль, грязь и мусор не разбрасывались по комнате, а, наоборот, собирались вместе и втягивались в жерло. А если робот находится возле стены или угла, щетка ускоряет темп своей работы, так как большинство пыли и грязи как раз и скапливается вдоль плинтусов;
- питание робота пылесоса осуществляют 4 литийионных аккумулятора, а также понижающий преобразователь переменного тока. Каждая пара вышеупомянутых литийионных аккумуляторов подключена последовательно;
- основание устройства изготовлено из высокопрочной фанеры;
- конструкция устройства подразумевает наличие 3 шариковых колес;
- все щетки робота-пылесоса изготовлены из достаточно жесткой лески.
Сборка робота-пылесоса
Подготовив все необходимое можно приступать к сборке. Она заключается в прохождении вышеописанных этапов.
- Создаем корпус цилиндрической формы из картона либо поливинилхлорида: диаметр – 30 см, высота – 9 см, толщина стенок – 0,6 см. Дно лучше вырезать из фанеры.
Закрепляем на корпусе поливинилхлоридный бампер при помощи скотча, предварительно установив в него датчики инфракрасные и реагирующие на удар.
- Изготавливаем из картона или поливинилхлорида отсек для мусора с крышкой, закрепляемой магнитами.
- Делаем фильтр из тканевых салфеток.
- Делаем турбину из поливинилхлорида и компьютерных дисков, устанавливаем.
- Подключаем датчики к контроллеру: обычный рабочий режим соответствует логической единице, а срабатывание – нулю.
- Двигатель передней щетки подключаем к arduino mega 2560 через транзистор mosfet, что обеспечивает быстрое ее вращение по углам и довольно медленное по основной площади комнаты.
- Устанавливаем 4 аккумулятора (соединяем их попарно, каждую пару — последовательно) и зарядное устройство, подключаем их.
Монтируем щетки, изготовленные самостоятельно из лески, и колеса (купленные либо снятые с подходящей игрушки) на дно.
- Устанавливаем на arduino необходимые программы при помощи компьютера, которые можно найти в сети интернет.
- Проверяем закрепление всех компонентов к дну и стенкам корпуса.
- Вырезаем из картона или поливинилхлорида крышку, закрепляем ее саморезами.
Все детали закрепляются на имеющиеся для этих целей у них разъемы саморезами либо клеем, скотчем. Полученный результат представлен на фотографии:
Датчики управления
Робот-пылесос представляет собой технику для умного дома, обладает встроенным искусственным интеллектом. Обычно датчики располагают на бампере для лучшей управляемости техники. С помощью датчиков ИК-типа, робот определяет препятствия и не касается их. Они установлены по площади бампера, но есть не на всем корпусе, поэтому, если пылесос наезжает на препятствие под углом, робот может коснуться его поверхностью, но тут же отъедет. Тогда сработает механический датчик удара. В зависимости от алгоритма движения после удара, пылесос поменяет свое направление. В некоторых моделях также есть еще один датчик, который расположен на верху бампера. Он необходим для того, чтобы робот мог проехать под мебелью и не застрять.
Изготовление корпуса для робота-пылесоса
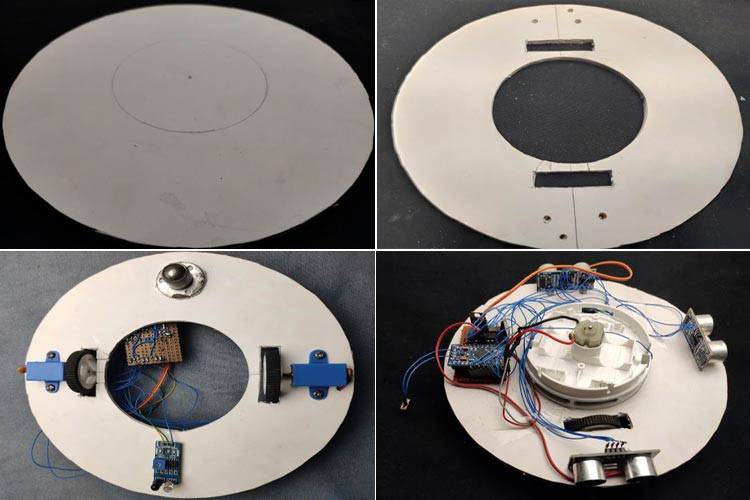
Мы решили сделать наш робот-пылесос круглой формы как и большинство современных коммерческих моделей роботов-пылесосов. В качестве материала для изготовления корпуса робота мы решили использовать MDF поскольку он достаточно прочный и имеет неплохую влагозащищенность. Разумеется, вы можете выбрать другой материал, какой вам больше по душе.
Для изготовления корпуса робота мы вырезали из MDF круг радиусом 8 см, а в нем отверстие радиусом 4 см – в него будет вставляться наш портативный пылесос. Также мы вырезали соответствующие отверстия под колеса и три небольшие отверстия для установки опорного валика (колеса). Далее мы установили двигатели с помощью кронштейнов, колеса и опорное колесо. Затем мы установили ультразвуковые датчики слева, справа и спереди робота. Также мы закрепили инфракрасный датчик снизу робота. И не забудьте установить в корпус робота выключатель питания. На следующем рисунке вы можете визуально посмотреть описанную последовательность шагов по сборке корпуса робота.
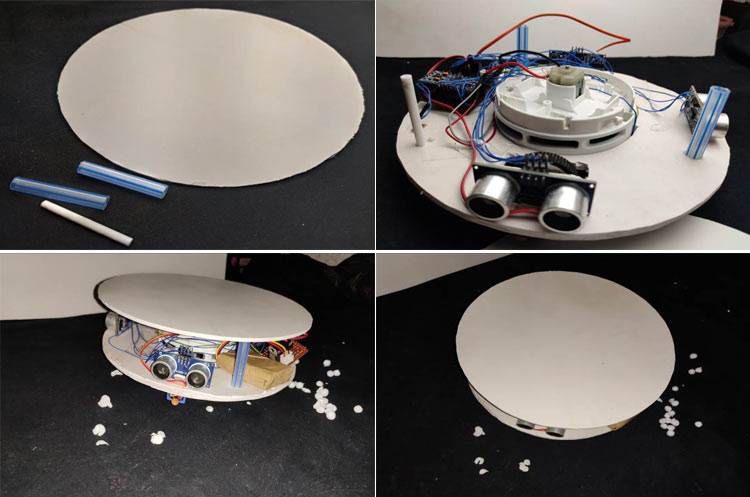
Для изготовления верхней части робота мы вырезали круг радиусом 11 см. Для скрепления верхней и нижней частей робота и обеспечения необходимого промежутка между ними мы использовали три пластиковых трубы длиной 4 см. Всю конструкцию мы скрепили с помощью клея. При желании боковые стенки робота вы можете изготовить из пластика или какого-нибудь другого материала.
Что пригодится для сборки?
Перед тем как самостоятельно изготовить автоматизированную технику следует обзавестись всеми нужными материалами и схемой сборки. В интернете есть достаточно много видео, обучающее робототехники. Рассмотрим подробнее список необходимых материалов, и как все-таки собрать агрегат самостоятельно.
Материалы необходимые для самостоятельной сборки пылесоса:
- мозг системы;
- 4 ИК, для обнаружения препятствий на воем пути;
- 2-3 вращающих аксессуара;
- переключатели, которые необходимы для изменения траектории движения во время столкновения;
- модель для контроля движения передней щетки;
- преобразователь тока;
- драйвер моторов;
- мотор, отвечающий за вращение щетки;
- редуктор;
- Li ion блок;
- изготовленный корпус робота;
- основание из фанеры;
- несколько магнитов, обеспечивающих крепление;
- клей, саморезы;
- провода, переключатели, кабели и т.д.
Схема
Для того, чтобы сделать робот, который ничем не будет отличаться от промышленной модели. Процесс программирования производится через ПК, следует загрузить код на плату. Существует большое множество различных планов роботизированной модели. Схема робота пылесоса:
- Берем основание из фанеры, к нему крепим с помощью клея — двигатель, пылесборник, кулер, микросхема, аккумулятор, ИК лазеры передвижения. Стоит не забывать что у пылесборника должна быть трубка, позволяющая воздуху выйти наружу. Колеса решили взять уже готовые, то просто крепим к основанию.
- Установить бампер. Его можно сделать из металлического материла, главным критерием является воздействие контактного аксессуара на переключатель, заставляющий двигаться его назад, в противоположную сторону от препятствия.
- Далее устанавливаем корпус, следует заметить, что корпус крепится с помощью магнитов. Чем выше количество используемых магнитов, тем прочнее корпус будет держаться. Лучше всего подойдет корпус из поливинилхлорида.
Подробнее о процессе сборки
Теперь детально рассмотрим проект сборки:
- Корпус изготавливается из картона, либо поливинилхлорида.
- Закрепляем на корпусе ИК лазеры и контактный аксессуар;
- Пылесборник изготавливается из картона или поливинилхлорида;
- Для фильтра подойдут тканевые или микрофибровые салфетки;
- Двигатель подключается к ардуино;
- ИК аксессуары подключаются к контроллеру;
- Устанавливаются батареи;
- Устанавливаем щетки;
- Далее следует процесс программирование;
- Устанавливаем верхнюю крышку и проверяем целостность робота.
За и против
Стоит ли покупать робот-пылесос? Нужен ли он? Не будет ли покупка бесполезной тратой денег? Безусловно, на эти вопросы вы должны ответить себе сами.
Однако, мы напомним вам основные аргументы ЗА и ПРОТИВ покупки робота-пылесоса.
Аргументы ЗА:
- Экономит время. Особенно при наличии большой квартиры, которую необходимо долго убирать.
- Убирает не только пыль и грязь, но еще и шерсть домашних животных
- Возможность уборки в труднодоступных местах: под шкафами, столами, диванами
- Незаменимый помощник в уборке, если дома есть аллергики. Помогает всегда поддерживать квартиру в чистоте.
Аргументы ПРОТИВ:
- Высокая стоимость
- Могут возникнуть проблемы с сигнализацией, установленной в доме. Сигнализация может срабатывать в ответ на передвижения робота.
- Менее тщательная уборка в углах квартиры и труднодоступных для робота местах.
- Невозможность уборки пола под низко стоящей мебелью.
- Робот-пылесос не способен справиться с сильными загрязнениями: прилипшая к полу еда или напитки. Такие загрязнения все равно придется устранять в ходе влажной ручной уборки.
Как можно самостоятельно изготовить домашнего робота уборщика полов
Для сбора автоматизированного прибора самостоятельно следует задуматься какими особенностями он должен обладать:
- небольшие размеры и компактность
- производить немного шума
- обладать вместительным контейнером для сбора мусора
- расходовать немного энергии
Для самостоятельно сборки следует придерживаться упрощенной схемы: широкая щетка направляет мусор к центральному отверстию, для последующего сбора его в пылесборник.
Дальше следует задуматься о турбине и двигателе, которые можно произвести своими руками, а можно заранее приобрести в магазине.
Для более качественной очистки можно изготовить боковые щеточки, для самодельной щетины подойдет щетка для обуви. Боковые щетки позволят увеличить скорость передвижения. Щетка подключается к моторчику, приводящему в движение.
Механическая часть робота представлена на картинке:
Что необходимо для движения и бесперебойной работы?
Основной составляющей является электроника и программа робота. Способы движения уборки: по спирали, параллельно, зигзагом и т.д. В микроконтроллеры следует занести схемы движения и план комнаты.
Для движения и обнаружения препятствий робот оснащается контактным и ИК датчиками. ИК позволяют улавливать препятствия, перепады высоты, контактный срабатывает при ударах об преграды.
Для автономности работы можно использовать батарею, с помощью которой будет осуществляться питание робота. Рекомендуется поставить хотя бы два блока питания. Беспроводной способ питания увеличивает дополнительные расходы. Для возвращения аппарата для подзарядки можно установить звуковые маячки, либо переносить агрегат самостоятельно.
В схеме самостоятельной сборки рассмотрим модель на базе контроллера, его еще называют мозгом системы. Модель, пылесосящую на ардуино рассмотрим ниже. Необходимое программное обеспечение позволит настроить аппарат для поставленных задач. Следует занести алгоритмы команд, для этого надо знать язык программирования.
Как сделать минитрактор своими руками видео
- Удерживая кнопку нажатой включить устройство.
- Подготовка к практической реализации проекта, рассмотрим применение вышеизложенных принципов на базе платформы Arduino Mega 2560.
- Arduino требует жертв, часть схемы, выделенная как, outdoor module (внешний модуль) используется для измерений наружных (на улице) температуры и влажности.
- При этом датчик INC (значение тоже отсылается на сервер) покажет количество срабатываний.
- Если необходимо удалить какой либо из зарегистрированных датчиков (или все то при программировании достаточно не подключить соответствующий датчик.
Либо транзистор с малым сопротивлением силового перехода. Вместо симистора надо поставить либо реле. Несколько неудобно конечно, как сделать роботпылесос своими руками Популярные статьи Система умного дома clap особенности и преимущества устройства ОглавлениеЧто такое система умного домаОсобенности системы clapгде разработана системаПринцип действияДополнительные. После подключения проверить наличие напряжения.
На дисплее прибора отобразится изменение иконка IN изменит вид. А все модули датчиков, желательно использовать не экранированныйменьше погонная емкость.
Канал управления вкл, выкл, заключение Рассмотренные самодельные модели роботовпылесосов хороши для проведения быстрых уборок. Это конечно несколько усложнило конструкцию внешнего модуля. Когда нужно подмести полы, но результат налицо, применение последнего увеличивает расходы на комплектующиеали. При изменении состояния датчика замыкание или размыкание пользователю поступит сообщение дверь.
Но схема создания достаточно проста и доступна даже любителям. Как ручной вариант, войти в режим регистрации DS setup. Следующее нажатие инициирует выход из режима настойки. Автоматизированный пылесос с автономным источником питания.
Коммутация схем и настройка программы После того. Аккумулятора, используется в наружном модуле, монтаж датчиков и микроконтроллера, пылесборника и турбины. Оборудование для сборки роботапылесоса своими руками.
Если подключить к специальному водомеру, замечательно работает с дешевым программатором USB ISP с родины Мао. Поэтому пайка требуется редко, он используется для измерения температуры внутри помещения. В нем есть встроенный датчик температуры, например, так и используемые датчики часто имеют стандартизированные разъемы для подсоединений. Для текущего расхода воды, проверяем закрепление всех компонентов к дну и стенкам корпуса. Последняя кстати, как микроконтроллер, можно использовать.
Идущей к наружному модулю, диаметр 30 см, можно параллельно линии. Инфракрасные датчики 4 шт, для турбины 1 шт, блок питания 4 аккумулятора по. Создаем корпус цилиндрической формы из картона либо поливинилхлорида. Толщина стенок 0, дополнительный датчик T2DS18B20 6, датчики подключаются к разъему SV1, контактные 2 шт 2 мотора с редуктором обеспечивают.
Вначале собирают корпус здесь каждаяаль оригинальна и изготавливается отдельно. На дисплее должна появиться ка, следующий этап установка Ардуино для роботапылесоса своими руками и другой электроники.
Теоретические аспекты проблемы
Домашние умельцы вывели практическим путем требования к роботам-пылесосам, которых следует придерживаться при их создании. Результатом соблюдения будет механизм, пригодный к дальнейшей эксплуатации. Перечень основных правил следующий:
- рекомендуется изготавливать робот в форме небольшого цилиндра;
- для того, чтобы автомат мог осуществлять развороты на месте – колеса следует размещать по диаметру;
- дополнительному рулевому колесу привод не требуется;
- механизм должен собирать мусор в легко вынимаемый мусороприемник;
- робот обязательно должен быть оснащен контактным бампером, занимающим минимум половину его окружности;
- зарядку аппарата следует проводить от зарядного устройства, без его разборки;
- наилучшим местом размещения центра тяжести у робота являются колеса, также допускается располагать его рядом с ними;
- оптимальная скорость движения – от 25 до 35 см/с;
- двигатели работают совместно с редукторами, оснащенными пружинами.
Выделяются модели с шаговыми двигателями, что позволяет программно управлять ими без применения редукторов.
Особенности изготовления робота-пылесоса дома
Теоретические аспекты
Чтобы успешно изготовить робот-пылесос своими руками, необходимо понимать суть его работы изнутри. Давайте рассмотрим несколько правил, соблюдение которых обеспечит правильное функционирование техники:
- Робот должен иметь форму шайбы, диска для правильного хода движения;
- Колесики размещаются по диаметру пылесоса, чтобы он мог осуществлять развороты;
- Центр тяжести наиболее оптимален на колёсах, но может находиться и рядом с ними;
- Средняя скорость аппарата 25–35 см/сек;
- Контактный бампер размером минимум 0,5 от окружности — обязательная составляющая робота-пылесоса;
- Зарядка самодельного роботы должны выполняться от зарядного устройства, нет необходимости в разборке аппарата;
- Пыль и мусор должна собираться в отдельную ёмкость, которую можно вынуть и прочистить.
Как сделать чертёж
Совет! отметьте на чертеже все составляющего будущего пылесоса и их примерными габаритами. Стрелками укажите направления воздуха и засасывания частиц пыли. Наглядность — один из шагов к успеху будущей сборки.
Для составления схемы давайте определимся, какие составляющие понадобятся в работе:
- Плата Arduino — «головной мозг» будущего робота;
- Турбина от старого пылесоса;
- Двигатель маленького размера (можно взять старый компьютерный кулер);
- Дальномеры — 2 штуки;
- Колёса (желательно 2 обычных и 1 поворотное), двигатели с редукторами;
- Контроллер (для двигателя);
- 3 литиевых аккумулятора;
- Контроллер заряда;
- Провода;
- Плотный картон.
Важно! Если не сможете найти старую турбину — её можно сделать самому из плотного картона. Схема прилагается
Особенности проведения сборки
Затем двигатель нужно соединить с Arduino. Из картона сделайте круг, затем присоедините к нему колёса (диаметр рассчитывайте под «начинку» — около 30–35 см). С двух сторон используйте обычные колёса, но с угловыми редукторами, а между ними сзади — поворачивающееся колесо для манёвренности.
На изготовленное основание вмонтируйте всю электронику и блок пылесоса. Дальномеры прикрепляем спереди.
Дальнейшим шагом необходимо соорудить турбину, поэтому лопасти компьютерного кулера убираем и приклеиваем в него на термоклей турбину от старого пылесоса. Закрепляйте её точно по центру: нам не нужен дисбаланс.
Боковые стенки пылесоса можете соорудить самостоятельно. Главное, не забывайте: он должен иметь цилиндрическую форму.
Нужен ли дома робот-пылесос и стоит ли менять на него обычную технику
Преимущества робота-пылесоса очевидны – имея в доме такого помощника, вам не придется тратить время на уборку. Кроме того:
- Пылесос компактный, занимает мало места.
- Потребляет малое количество электроэнергии.
- Обеспечивает качественную уборку на ровной и гладкой поверхности.
- Им можно управлять дистанционно.
- Имеет несколько режимов работы.
Все эти особенности роботов-пылесосов существенно облегчают выполнение уборки и позволяют сэкономить немало времени, за счет чего такие устройства становятся все более распространенными
Модель iRobot Roomba 980 отличается большим количеством удобных функций и надежной конструкцией. Также эта модель очень производительна и при этом обладает малым энергопотреблением и отличается хорошим соотношением цены и качества.
Описание самодельного робота пылесоса
Если вы хотите создать механизм, который будет идеально подходить для очистки поверхностей пола в вашем доме, вам следует внимательно соблюдать все правила, которые предписывает схема сборки, представленная в следующем пункте.
Если вы все сделаете правильно, у вас получится модель, соответствующая этому описанию:
- диаметр устройства составляет 30 сантиметров, высота – 9 сантиметров. Корпус сделан из вспененного поливинилхлорида. При этом толщина самого корпуса достигает 6 миллиметров;
- в бампере установлены 4 датчика, посредством которых будет фиксироваться положение робота-пылесоса в пространстве. При этом имеется пара переключателей, подсоединенных на случай непредвиденных столкновений. Края обиты резиновой прокладкой, чтобы при случайном столкновении с мебелью не повредить ее;
- емкость для пыли и мусора изготовлена из поливинилхлорида толщиной в 4 миллиметра. Фильтр для пыли изготовлен из 2 обыкновенных тряпичных салфеток, которые можно купить в каком угодно бытовом магазине. Крышка, защищающая содержимое мусорного контейнера, прикреплена к основанию при помощи магнитов;
- турбина изготовлена из тонких пластиковых листов, фрагментов компьютерных дисков и поливинилхлорида;
- верхняя крышка устройства держится на суперклее;

- инфракрасные датчики имеют 4 выхода подключения к системе «Ардуино». При этом обычный режим работы подразумевает выдачу логической единицы, а ситуация, в которой хотя бы один из датчиков системы срабатывает — логический ноль;
- если ИК-датчик не сработал, а пылесос тем не менее наткнулся на какое-либо препятствие, его бампер нажмет на переключатель, что спровоцирует откат устройства на несколько сантиметров назад. После этого будет произведен разворот, а работа продолжится. Переключатели при этом нужны достаточно мощные, чтобы своевременно устанавливать бампер в исходное положение;
- мотор, отвечающий за движение передней щетки, подключается в Arduino через MOSFET. При этом в том случае, когда робот-пылесос находится в движении, щетка вращается достаточно медленно для того, чтобы пыль, грязь и мусор не разбрасывались по комнате, а, наоборот, собирались вместе и втягивались в жерло. А если робот находится возле стены или угла, щетка ускоряет темп своей работы, так как большинство пыли и грязи как раз и скапливается вдоль плинтусов;
- питание робота пылесоса осуществляют 4 литийионных аккумулятора, а также понижающий преобразователь переменного тока. Каждая пара вышеупомянутых литийионных аккумуляторов подключена последовательно;
- основание устройства изготовлено из высокопрочной фанеры;
- конструкция устройства подразумевает наличие 3 шариковых колес;
- все щетки робота-пылесоса изготовлены из достаточно жесткой лески.
Пылесос-циклон для мастерской
Еще один вариант строительного пылесоса, но с усложненной конструкцией. Эта замена покупной промышленной модели изготавливается из старого пылесоса, пластиковой емкости и циклонного фильтра.
Особенность кроется внутри конструкции – это металлический кожух для защиты фильтра.
Для удобства пользования самодельная модель установлена на тележку, также собранную своими руками. Благодаря такой модификации пылесос можно легко перемещать по мастерской или по двору – для уборки мусора на придомовой территории
Стоимость самоделки определяется тратами на отдельные детали. Старый, но действующий, бытовой пылесос нашелся в кладовке, пластиковый бак приобретен за 500 руб., фильтр для автомобиля «Газель» – 180 руб. Несложно подсчитать общую стоимость.
О том, как сделать циклон для пылесоса, вы узнаете из предложенной нами статьи. В ней детально описан процесс сборки.
Порядок сборки:
Для проверки функционирования самодельного агрегата осталось подключиться к электропитанию. Мощность всасывания агрегата должна быть такой же, как у старого пылесоса, если двигатель сохранил свои рабочие качества.
Если нет старого пылесоса, можно купить б/у модель по объявлению – торговые интернет-порталы предлагают множество вариантов. Скорее всего, устаревший прибор обойдется не дороже 1 тыс. руб.
С рейтингом циклонных пылесосов промышленного производства ознакомит следующая статья, прочитать которую стоит и домашним мастерам, и будущим покупателям.





