

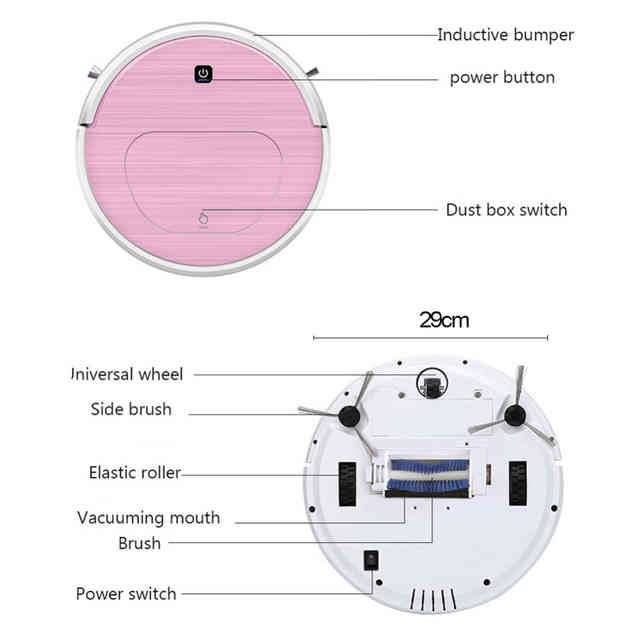
Cхема робота-пылесоса

Основными элементами схемы робота-пылесоса являются:
- 6 электроприводов.
- Микроконтроллер.
- Датчик присоединения.
- ИК-приемник.
- Датчики перепада высоты.
- Светодиоды для экрана.
- Гироскоп для поворотов.
Шесть электроприводов отвечают за боковые щетки, турбощетку, всасывающий модуль, а также за движение боковых колес.
Материнская плата имеет модуль камеры, дисплей, модуль управления всеми приводами, а также специальный переходник, который через базу для зарядки робота заряжает аккумулятор. Сам аккумулятор питает все остальные элементы схемы.
На материнской плате также есть специальная батарейка.
Установка русского голосового пакета с помощью телефона(Android)
Вариант с автоматическим определением ip адреса и получением токена.
Токен — уникальный идентификатор робота пылесоса(после сброса настроек wifi изменяется).
- Скачиваем и устанавливаем на телефон программу XVacuum Firmware 4.0.0
- Скачиваем для примера официальный русский язык ru_official и распаковываем из архива, в результате на телефоне должен находится файл с расширением .pkg
- Зажимаем на пылесосе две кнопки на несколько секунд пока не прозвучит фраза о сбросе настроек Wifi(скорее всего будет на китайском языке)
 Зажимаем две кнопки для сброса настроек wifi
Зажимаем две кнопки для сброса настроек wifi
Далее на телефоне желательно отключить мобильный интернет и включить wifi, в списке доступных сетей у нас должна появиться сеть от нашего робота к которой нам и необходимо подключиться.
Подключаемся к wifi сети от робота пылесоса
Теперь запускам программу Xvacuum Firmware, выбираем Flash Sound
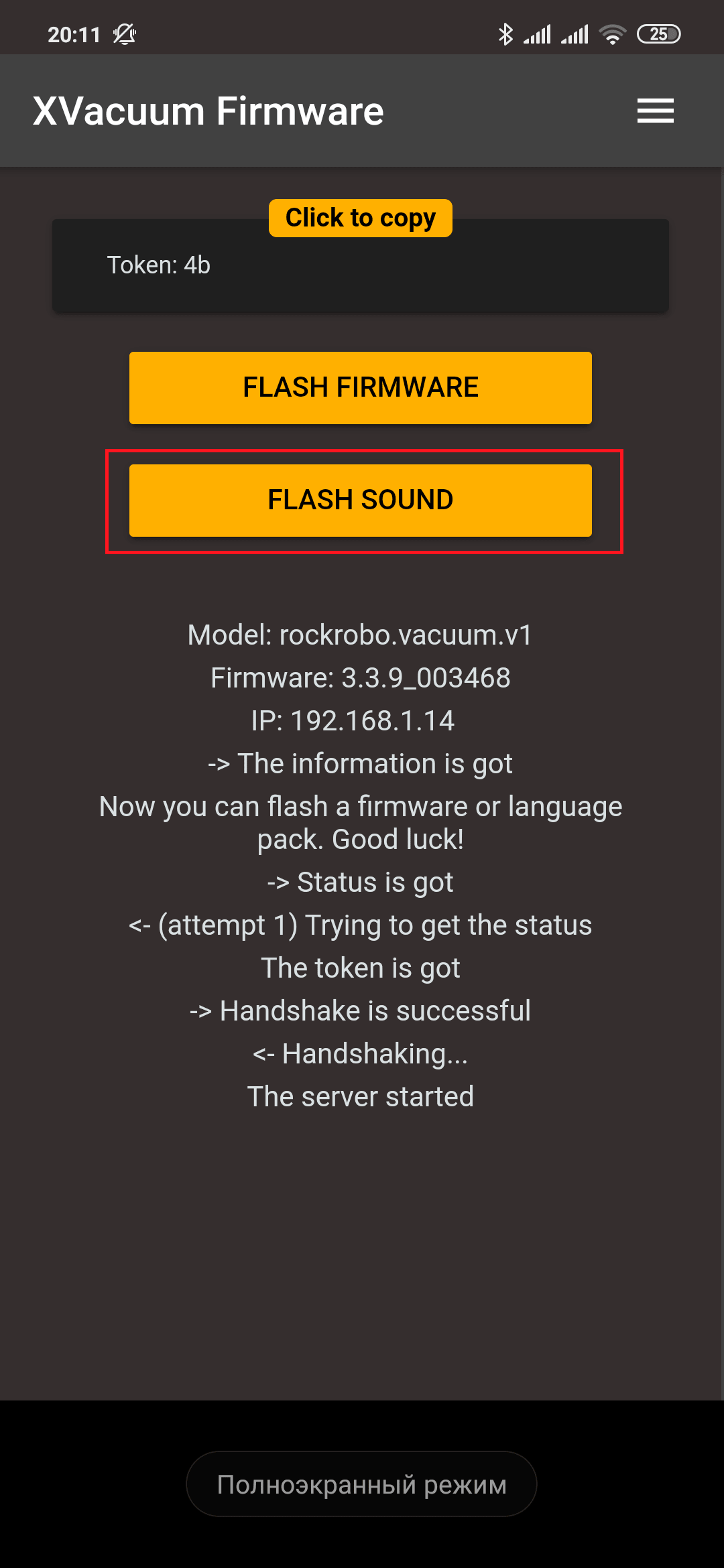 Xvacuum Firmware нажимаем на кнопку Flash Sound
Xvacuum Firmware нажимаем на кнопку Flash Sound
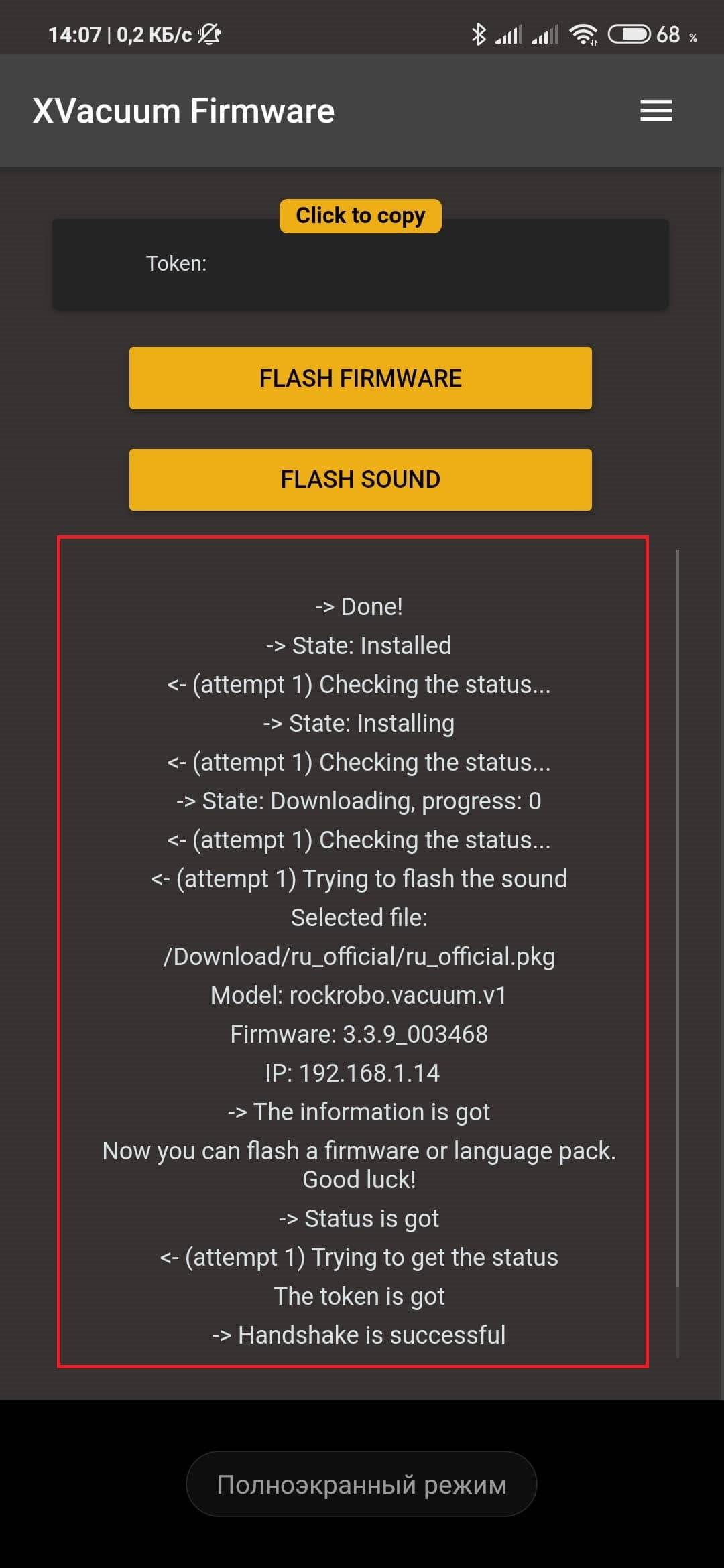
Выбираем голосовой пакет, который перед этим извлекали из архива на телефоне.
 Выбираем голосовой пакет, который скачали ранее
Выбираем голосовой пакет, который скачали ранее
Ждем завершения процесса установки.
Управление автономного пылесоса X500 от Neatsvor
Есть 3 типа контроля:
- ручной (ограниченный, кнопка на корпусе только для старта/паузы, и сбоку на торце для вкл./выкл. питания);
- дистанционный, в комплекте есть пульт;
- со смартфона через приложение и Wi-Fi. Роботом уборщиком можно управлять с любой точки мира, где есть интернет.
Запланировать уборку можно посредством приложения или с пульта, его функционал отображен ниже:
Аппарат, управляемый приложением, может подключаться в сервисы «умных домов», но только те, которые поддерживают бренд, в данном случае Google Home. Впрочем, если не удается подключиться, это может и не слишком разочаровать, так как не составит особого труда управлять гаджетом из того же смартфона параллельно, просто запустив отдельно его приложение.
Итак, помимо ДУ, Neatsvor X500 управляется плагином WeBack, голосовыми слугами Amazon Alexa и Google Assistant.
Возможности управления через приложение:
- режимы, старт, стоп;
- планирование, график на каждый день недели;
- автозаезд на базу;
- настройка силы всасывания — 1200 и 1800 Па;
- 2D карта, то есть аппарат строит план помещения, основываясь на данных датчиков, и по ним планирует оптимальные движения, запоминает уже пройденные участки. Некоторый минус в том, что нет интерактивности чертежа, то есть пользователь может только просмотреть его;
- настройка и визуализация параметров продолжительности уборки, считывание данных по обработанной площади, по заряду;
- через приложение можно управлять аппаратом самостоятельно кнопками-указателями на экране смартфона.
Плагин и смартфон — это самый полный контроль для пользователя. Перечисленные выше возможности, но кроме карты и прочей визуализации, можно реализовать через пульт ДУ. Ручное же управление кнопками на корпусе ограниченное: только старт/стоп и вкл./выкл. питания.









Особенности управления
С помощью гироскопа и датчиков X500 создает карту движений (онлайн), планирует маршрут, помнит место базы, пройденные площади.
Датчики, инструменты навигации
Для навигации X500 использует сенсоры ИК. Детекторы узнают препятствия в границах 1 м по курсу. Недостаток: это несколько устарелые датчики, их мало, всего 3 шт., из-за чего пользователи отмечают, что иногда аппарат впадает в кратковременную дезориентацию, впрочем, она не критическая.
Датчики падения и гироскоп производят идентификацию обрывов, высот, наклонов, порогов. Робот не упадет со ступенек, а также его можно поставить на верх шкафов, «стенок» и он будет двигаться только в пределах на крыше такой мебели не срываясь.
Навигация корректируется тычками, смягчающиеся бамперами на передней кромке, так как не всегда ИК-детектор может определить препятствие, например, такие сенсоры проблематично работают с отражающими, глянцевыми поверхностями.
Преодоление препятствий
Как мы уже отметили, конструкция низкопрофильная, несколько ниже (75 мм), чем обычно у таких приборов. Скорость аппарата — 18 см/сек.
Основные параметры навигации пылесоса X500 от Neatsvor отобразим таблицей:
Как видим, все основные, хотя и не слишком продвинутые «фишки», присутствуют в данном девайсе. Также аппарат отвечает всем стандартным требованиям для роботов-пылесосов по преодолению препятствий.
Днище скошенное, с большими колесами, что позволяет забираться на пороги до 15 мм высотой, такая цифра стандартная для многих автоуборщиков пылесосов. Аппарат может взбираться на порожки длиной до 30 мм, поднимающиеся под 25°.
Где взять и как залить прошивку
Программное обеспечение, или прошивка – это то, без чего наш робот-пылесос не сдвинется с места, не будет выполнять свои функции домашнего помощника. Взять ее можно на том же ресурсе, где приобреталась плата Arduino, или на одном из любительских сайтов, где собираются самоделкины.








В одном из решений автор разработки любезно поделился с читателями программой, рассчитанной на самую простую, хаотичную уборку. Вообще Arduino – это платформа, на которой энтузиасты сами создают решения под свои нужды. Поэтому существует 2 пути: писать ПО самостоятельно (если вы умеете программировать) или воспользоваться чьей-то помощью, взять готовое.
Без базовых знаний об Arduino, ПК, принципе их взаимодействия не обойтись. Тем, кто не уверен в собственных силах, лучше не рисковать. Существуют несколько способов синхронизации микроконтроллера Arduino, заливки ПО:
- используя среду Arduino IDE;
- программатором;
- подключением к другой плате Arduino.
Первый способ подразумевает загрузку (или использование онлайн) программной среды Arduino IDE. ПО работает на большинстве современных ОС – Windows, Linux, Mac OS. Перед тем, как начать действовать, очень желательно понимать, что именно предпринимается.
Делать с Arduino что-то вслепую, методом проб и ошибок, настоятельно не рекомендуется. Лучше заказать уже готовую и прошитую плату. Также следует заранее приготовить USB-кабель для подключения. Вся информация о работе с Arduino, ее программной средой есть в сети. Освоить ее несложно, было бы желание.
Интерфейс Arduino IDE достаточно прост, интуитивен. Если что-то не получается, всегда можно обратиться за помощью к специальному разделу Arduino Wiki.
Следующий способ заключается в использовании программатора. Это специальное устройство, приобретаемое отдельно. Зато оно позволяет работать с разными платами Arduino, загружать на них ПО.

Последнее предложение использует одну из Arduino в качестве программатора. Способ ничуть не хуже прочих, достаточно действенный. Чтобы реализовать каждый из предложенных вариантов, не разбирая каждый раз пылесос, следует предусмотреть доступ к разъему платы в корпусе. Это может быть окно, выведенный под крышку пылесоса шнур-удлинитель с коннектором USB или свой собственный способ. Лишь бы было удобно пользоваться.
Влажная уборка
Порядок действий, служащий руководством для включения влажной очистки:
- Увлажнить микрофибру под краном, приклеить к липучкам на дне резервуара.
- Наполнить бак водой.
- Вставить контейнер (пылесборник, конечно же, надо предварительно вытащить, поскольку место для контейнеров одно и то же).
- На пульте нажимают на функцию смачивания, включается встроенная в бак электропомпа.
- Активировать автоматический или иной режим приложением.
Рекомендовано предварительно осуществить сухую чистку. Но если не весь мусор собран, то также при влажной уборке пылесос X500 соберет его небольшое количество, для чего предусмотрен маленький отсек около водного резервуара. Одновременно фибра будет выполнять основную работу — протирать от пыли и загрязнений пол. Салфетка смачивается сразу на 5 сегментах электронасосом через тканевую прослойку.
Недостаток: X500 не различает материалы, поэтому надо убирать мягкое, ворсистое покрытие, иначе аппарат будет двигать по нему влажной тряпкой.
Устранение возможных неисправностей
1) Нужно ли заряжать батарею и полностью разряжать первые 3 раза?
Литиевая батарея без эффекта памяти, поэтому достаточно полной зарядки.
2) Как сбросить настройки Wi-Fi?
В случаях, когда произошла потеря связи между роботом и телефоном (маршрутизатор изменил конфигурацию, вы забыли пароль или по каким-то другим причинам), откройте верхнюю крышку, чтобы видеть индикатор Wi-Fi. Затем нажмите одновременно на кнопку питания и клавишу Home до тех пор, пока не услышите голосовое оповещение «Перезагрузка W-Fi». Если индикатор Wi-Fi снова нечасто замигает, это значит, что произведен успешный сброс.
Что понадобится для изготовления самодельного устройства
Чтобы сделать робот-пылесос ничуть не хуже (но дешевле) заводского, нужно не так много. Одна из аматорских конструкций пылесоса собрана из упаковочного гофрокартона, который применяется для упаковки грузов. Из него же делают коробки. Но для нормального эстетического впечатления необходимо нечто большее. Это может быть склеенный из пластика корпус пылесоса или готовый элемент, позаимствованный от пришедшего в негодность заводского робота-помощника.
Итак, что будет нужно в первую очередь:
- Микроконтроллер Arduino.
- Макетная плата.
- Дальномеры.
- Устройство управления двигателями.
- Моторы.
- Колеса.
- Кулер от компьютера.
- Турбина.
- Аккумуляторы типоразмера 18650.
- Провод.
Это минимальный вариант комплектации пылесоса. В дальнейшем роботокомплекс пылесоса допускается модернизировать, адаптировать под конкретную ситуацию.
Подготовка к практической реализации проекта
Рассмотрим применение вышеизложенных принципов на базе платформы Arduino Mega 2560. Процесс создания будет состоять из нескольких этапов:
- подготовка инструментов и материалов;
- изготовление корпуса с колесами и отделом под мусор, пылесборника и турбины;
- монтаж датчиков и микроконтроллера, моторов с редукторами, аккумулятора, щеток;
- выполнение электрических подключений;
- введение программы в Arduino, определение согласованности датчиков;
- проверка работоспособности робота-пылесоса и его способности заряжаться самостоятельно.
Идея реализуется с помощью следующих материалов и инструментов:
- контроллер Arduino – 1 шт, с драйверами;
- лист фанеры (либо плотный картон) – 1 м.кв;
- колеса – 3 шт;
- провод сечением не более 0,75 мм.кв (подойдет витая пара) – около 2 м;
- блок питания – 4 аккумулятора по 18 V, индикатор заряда к ним, зарядное устройство;
- инфракрасные датчики – 4 шт, контактные – 2 шт;
- электродвигатели: для турбины – 1 шт, вращающий щетку – 1 шт, 2 мотора с редуктором обеспечивают передвижение;
- поливинилхлоридный корпус – 1 шт;
- клей – 1 упаковка, саморезы – 10 шт, скотч – 1 шт, набор магнитов;
- набор отверток и сверл, плоскогубцы, нож канцелярский, карандаш, линейка, шуруповерт, электролобзик.
✔ УПАКОВКА И КОМПЛЕКТАЦИЯ
Прибыл с курьером от НовойПочты. Ещё не началась эпопея с курьерской доставкой НовойПочты, поэтому принесли домой. Но как видно по красному скотчу, посылку на НП вскрывали.








Сяомовцы не стали делать красочную белую упаковку, как для остальных новинок, а сделали её в духе своих первых упаковок, из переработанного картона.
Внутри ещё одна коробка, с рисунком пылесоса.

Вещь габаритная и хрупкая, поэтому сверху и снизу защищена толстой пенопластовой «крышкой».
Инструкцию вложили в небольшое углубление крышки.

Внутри инструкции, как и у всех, продуктов компании, все на китайском языке.
Отдельно находился небольшой вкладыш, с информацией о том, что туалетную бумагу, провода и вазу с цветами, луче убрать с пола в момент уборки.
За сохранность пылесоса переживать не стоит, уверен, что издевательства грузчиков упаковка выдержит.
В отдельной картонной коробке находится база для зарядки пылесоса.

Внутри которой находится кабель и приспособление для очистки центральной щётки

«Чистилка» чем-то похожа на цаплю-многоножку.

В конце «клюва» находится небольшая металлическая пластинка с заточенным краем. Очень удобно ей срезать намотанные на щётку нитки или длинные волосы.

База для подзарядки имеет две подпружиненные горизонтальные полоски для подзарядки робота.

Для хранения приспособления для чистки и ненужного кабеля в задней части базы есть специальный отсек закрытый пластиковой крышкой.

Кабель покрыт чем-то по типу софт-тача, очень приятный на ощупь. Вилка, как и у большинства продукции Сяоми, не для наших розеток, будет необходим переходник.









Дабы база не скользила по полу, в нижней части приклеены рифлёные резинки.

Чтобы лишний провод не мешал уборке, его можно намотать внутри базы и вывести с левой или правой стороны.

Схема проекта
Схема робота-пылесоса на основе платы Arduino представлена на следующем рисунке.
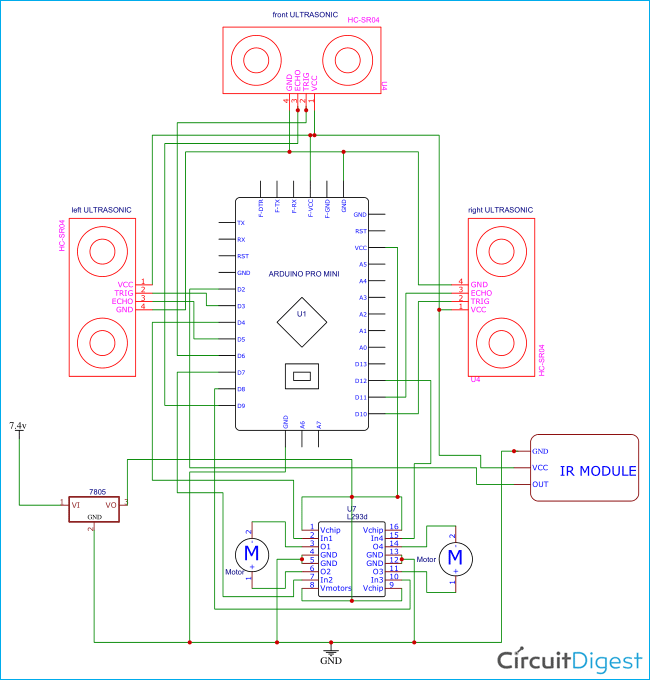
Для обнаружения препятствий мы в схеме робота используем три ультразвуковых датчика. Их контакты питания подключены к общему питанию схемы, а земля – к общему проводу схемы. Управляющие (trigger) и выходные контакты (echo pins) датчиков подключены к ШИМ (широтно-импульсная модуляция) платы Arduino. Инфракрасный датчик также запитывается от общих VCC и земли (ground) схемы, а его выходной контакт подключен к цифровому контакту D2 платы Arduino. У драйвера двигателя мы два его контакта, разрешающих его работу (enable pins), подключили к 5 В, также контакт подачи питающего напряжения мы подключили к 5 В поскольку мы используем электродвигатели, работающие от напряжения 5 В. Поскольку наш робот-пылесос запитывается от литий-ионной батареи напряжением 7.4 В, а все компоненты схемы питаются от напряжения 5 В, то для преобразования напряжения 7.4 В в напряжение 5 В мы используем регулятор напряжения LM7805.
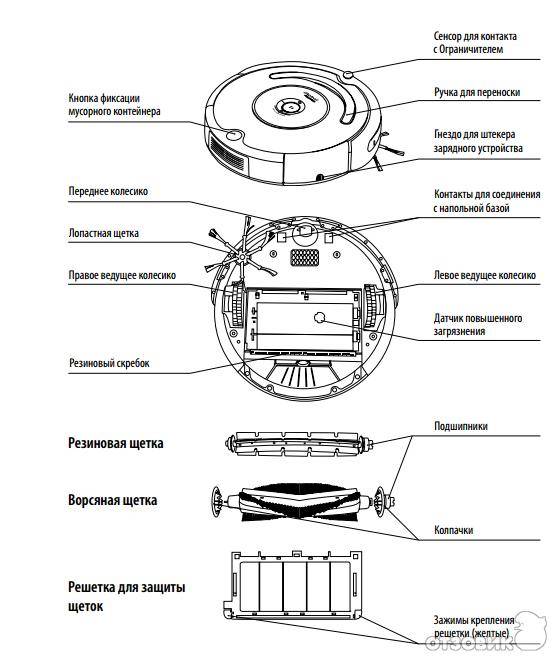
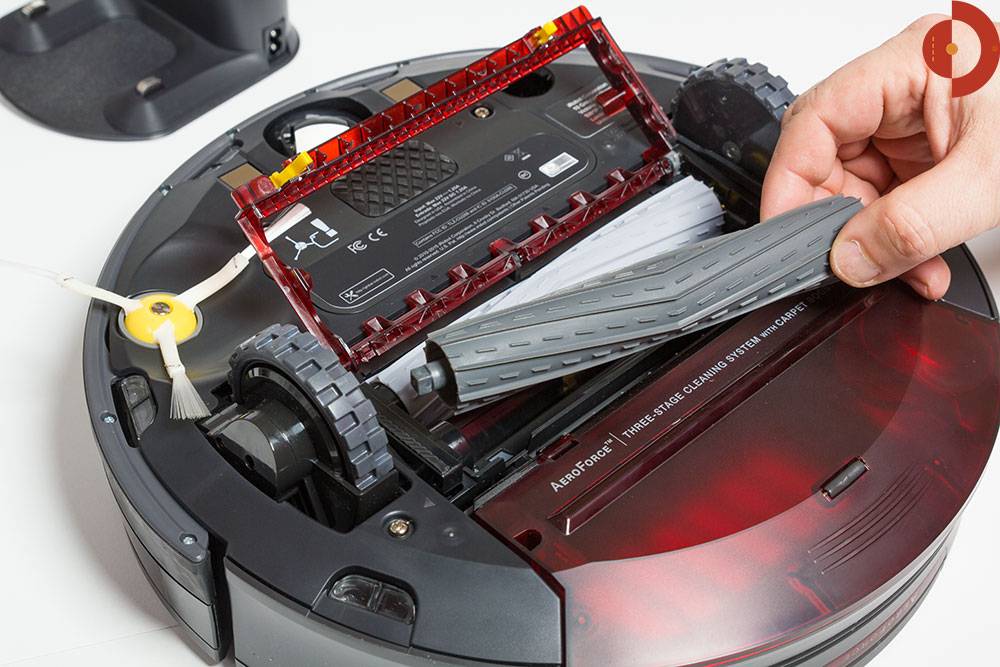
Щетки для уборки

Обычно в составе робота-пылесоса две боковые щетки для уборки. Они позволяют обеспечить более качественное избавление от пыли за одно движение техники. Проходя по полу, робот обеспечивает большую чистую полосу. Две боковые щетки отправляют всю пыль и грязь к основной турбощетке. Турбощетка переносит весь мусор в пылесборник. Для переноса использован всасывающий модуль.
Конструкция робота обеспечит качественную уборку даже в труднодоступных местах. Для того, чтобы добраться до плинтуса, необходима одна боковая щетка. Но пока до углов не может добраться ни одна модель интеллектуального пылесоса.
Для крупного мусора есть специальный скребок, он подбирает грязь с пола и отправляет в пылесборник.
Отличный вариант – робот Panda X600 Pet Series. Эта модель отличается хорошей мощностью, эффективной работой и легко ориентируется в пространстве. Дополнительным преимуществом модели является УФ-лампа для обеззараживания.
Обзор доступных официальных и неофициальных языковых пакетов
Голосовой сигнал сопровождает действия пылесоса и манипуляции с ним:
- включение;
- удаление и установку мусорного контейнера;
- запуск и остановку уборки;
- возвращение на базу;
- загрязнение фильтра и щетки;
- завершение установки обновлений;
- подключение к док станции для зарядки;
- отсутствие подключения док станции к сети;
- низкий уровень заряда батареи.
Официальный русскоязычный пакет ru_official — это перевод с китайского языка. В отредактированной версии 2008 голосовое сопровождение звучит громче, и отсутствуют шумы.
Примеры пакетов:
- «Алиса» — женский голос из Яндекс-службы, набор сообщений близкий к стандартному, но более адаптированный и приятных для слуха. Похожие версии – «Оксана» и «Захар»;
- «Максим» — пылесос говорит мужским голосом, обращается с почтением «Ваше величество». Для любителей крепкого словца есть версия с ненормативной лексикой;
- «Кожаные ублюдки» — смешная нецензурная озвучка из видеомемов на роботов «Boston Dynamics», которые ненавидят людей;
- «Домовенок Кузя» — после установки пылесос смешно разговаривает, как домовенок из мультфильма;
- звуки робота R2D2 — запуск и возвращение на базу также сопровождаются музыкой из «Звездных войн», ошибки озвучивает голос Алисы;
- «Винни-Пух» — изменено звуковое сопровождение ошибок, вместо китайской речи пылесос говорит голосом известного медведя.
Пылесос может говорить фразами из советских фильмов «Операция Ы», «Джентльмены удачи» или американского «Стражи галактики». Для фанатов сериала «Доктор Кто» записана озвучка с голосами роботов-пришельцев далеков. Нестандартные пакеты придумывают пользователи пылесосов. Различные варианты можно найти и скачать в интернете или придумать и записать собственный набор фраз. На роботах-пылесосах третьего поколения установлен официальный сертифицированный пакет. Его файлы защищены шифром. Поэтому поменять голос на домовенка или Ивана Васильевича не получится.
Особенности ухода
Когда робот-пылесос завершит работу, владелец должен почистить мусоросборник и щетки. Следует осмотреть колеса, на них часто наматываются волосы. Корпус, сенсоры и датчики движения протирают мягкой тканью, удаляя с поверхности пыль.
Ежемесячно снимают щетки, чистят те места, где они вставляются в корпус. На подшипниках быстро собирается пыль, она затрудняет работу щеток.
Раз в 6 месяцев владелец должен чистить робота внутри. Это можно сделать самостоятельно либо обратиться в сервисный центр. В процессе уборки внутрь техники попадает пыль. Если ее своевременно не удалять, детали выйдут из строя, пылесос сломается.
Изготавливаем корпус
Если сразу же захотелось сделать все правильно, то без корпуса для нашего пылесоса не обойтись. Для этого нам понадобится пластик – полистирол, поливинилхлорид.
Предварительно нужно прикинуть, как начинка разместится внутри корпуса. Если пойти по пути наименьшего сопротивления, то можно взять за основу эргономику любого готового пылесоса. Обычно они дисковой формы, примерно одинаковые по размерам. Значит, понадобится вырезать (изготовить) 2 круга одинакового диаметра и боковую стенку (сплошная полоса) пылесоса.

В зависимости от питания выделяется батарейный отсек. Лучше всего использовать широко распространенные АКБ 18650 – такие есть в ноутбуках, применяются в игрушках и пауэрбанках. Датчики движения размещаются впереди, они отвечают за «поведение» пылесоса. Непременно нужно учесть размещение колес, их приводов, центральной платы (Arduino) и турбины с пылесборником.
От правильности расчета, тщательности компоновки деталей зависит, придется в скором времени кардинально переделывать конструкцию пылесоса или ограничиться небольшой модернизацией. Размеры корпуса привязаны к типу микроконтроллера, дополнительных плат.
В оригинальном Arduino предусмотрено 3 градации: «Uno», «Pro», «Leonardo», а также платы с дополнительными разъемами («Mega», «Due»). Есть также и более компактные варианты – «Nano», «Micro». И это не считая многочисленных китайских клонов, которые ничуть не хуже по функционалу. Зато зачастую гораздо дешевле.









Поэтому лучше заранее предусмотреть указанные факторы. А уже потом начинать реализацию своей идеи, изготавливать корпус пылесоса. Меньше 30 сантиметров диаметр делать не стоит. Иначе ничего не поместится. Лучше затем использовать свободное пространство для добавления АКБ или расширения пылесборника.
Также конструкция корпуса должна учитывать возможность разборки, ремонта пылесоса. Поэтому рекомендуется сделать съемные крышки или лючки для обеспечения доступа к внутреннему пространству. Это займет чуть больше времени, чем просто изготовление пластиковых деталей. Возможно, даже придется сначала сделать макет пылесоса, нарисовать робота на бумаге.

Зато такой тактический ход избавит от множества проблем, связанных с перекомпоновкой, переделкой пылесоса. Зачастую устранение таких сложностей требует больших усилий, чем первоначальный расчет, размещение узлов с учетом перечисленных требований.
Не помешает также учесть, что микроконтроллер Arduino потребует прошивки, смены ПО. Для этого обязательно нужно вывести разъем, через который «мозг» робота станет подключаться к большому ПК. А уже после того, как определены все главные моменты, можно приступать к воплощению идеи пылесоса в реальность.
При выборе корпуса из ПВХ, полистирола для сборки используют соответствующий по составу клей. Он не подойдет для склейки деталей, отлитых из эпоксидной смолы. И для плит, изготовленных из «эпоксидки», клей тоже должен быть свой
Это важно понимать
Можно собрать корпус пылесоса даже и из тонкой (до 5 миллиметров) фанеры. Большая толщина приведет к увеличению веса. Меньшая не обеспечит требуемую жесткость. Работа с древесиной не представляется сложным занятием: детали выпиливаются лобзиком, ошкуриваются, подгоняются по размерам и склеиваются.
И, наконец, вариант для самых ленивых – найти корпус от негодного робота-пылесоса или купить готовый в одном из сетевых магазинов. Но в этом случае следует заранее подобрать комплектующие с учетом габаритов. Иначе придется менять что-то одно: или корпус, или детали.
Как можно самостоятельно изготовить домашнего робота уборщика полов
Для сбора автоматизированного прибора самостоятельно следует задуматься какими особенностями он должен обладать:
- небольшие размеры и компактность
- производить немного шума
- обладать вместительным контейнером для сбора мусора
- расходовать немного энергии
Для самостоятельно сборки следует придерживаться упрощенной схемы: широкая щетка направляет мусор к центральному отверстию, для последующего сбора его в пылесборник.
Дальше следует задуматься о турбине и двигателе, которые можно произвести своими руками, а можно заранее приобрести в магазине.
Для более качественной очистки можно изготовить боковые щеточки, для самодельной щетины подойдет щетка для обуви. Боковые щетки позволят увеличить скорость передвижения. Щетка подключается к моторчику, приводящему в движение.
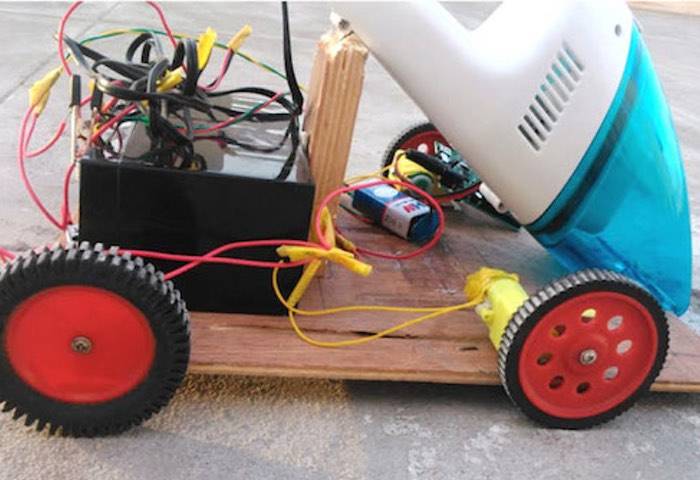
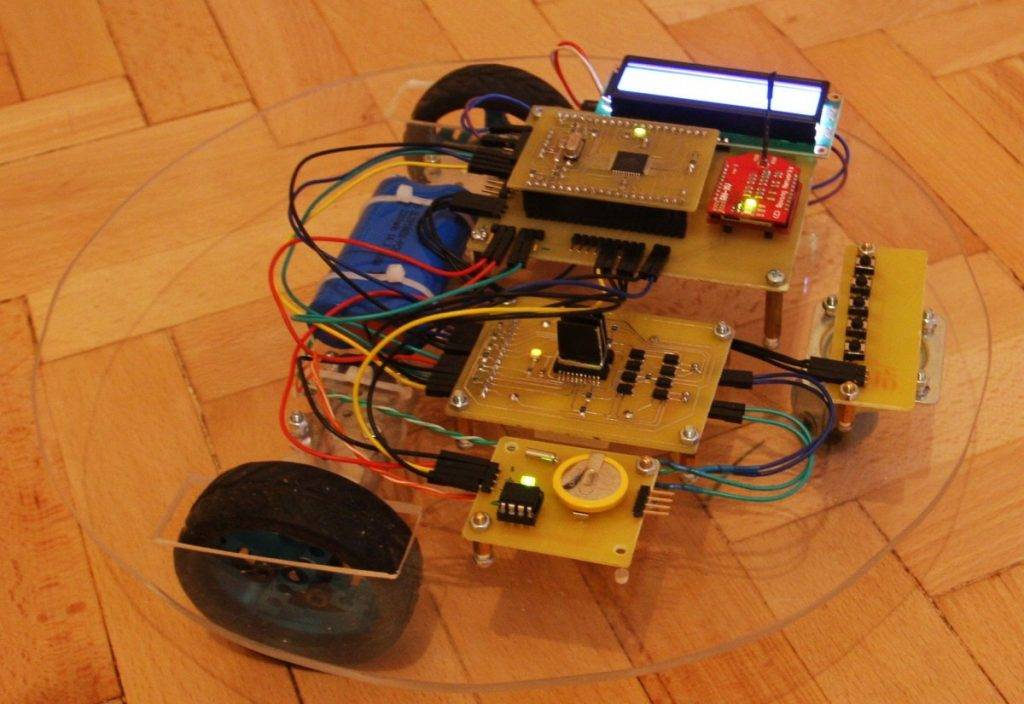
Механическая часть робота представлена на картинке:
Что необходимо для движения и бесперебойной работы?
Основной составляющей является электроника и программа робота. Способы движения уборки: по спирали, параллельно, зигзагом и т.д. В микроконтроллеры следует занести схемы движения и план комнаты.
Для движения и обнаружения препятствий робот оснащается контактным и ИК датчиками. ИК позволяют улавливать препятствия, перепады высоты, контактный срабатывает при ударах об преграды.
Для автономности работы можно использовать батарею, с помощью которой будет осуществляться питание робота. Рекомендуется поставить хотя бы два блока питания. Беспроводной способ питания увеличивает дополнительные расходы. Для возвращения аппарата для подзарядки можно установить звуковые маячки, либо переносить агрегат самостоятельно.
В схеме самостоятельной сборки рассмотрим модель на базе контроллера, его еще называют мозгом системы. Модель, пылесосящую на ардуино рассмотрим ниже. Необходимое программное обеспечение позволит настроить аппарат для поставленных задач. Следует занести алгоритмы команд, для этого надо знать язык программирования.
Итоги рейтинга роботов-пылесосов Xiaomi
Модели Roborock отличаются более высоким качеством сборки и лучше ориентируются в пространстве, однако и стоят дороже, чем роботы с аналогичными функциями, но других линеек пылесосов Xiaomi.
Если интересует преимущественно сухая уборка и у вас небольшая площадь, обратите внимание на бюджетные устройства Roborock E4 или Mijia G1. Также стоит присмотреться к Mi Robot Vacuum Cleaner 1S, который стоит немного больше, но оснащен лидаром для лучшей навигации.
Если площадь квартиры или дома большая, вам должен подойти Roborock S6 Pure или уже упомянутый Mi Robot Vacuum Cleaner 1S.
Если у вас в приоритете влажная уборка, для малой площади (до 60 кв
м) можно купить Mijia 1C. Для больших помещений лучше подойдут Dreame F9, Mijia LDS, Viomi V3, Roborock S5 Max или S6 MaxV.
Кстати, недавно в России начал официально продаваться беспроводной ручной пылесос Mi Handheld Vacuum Cleaner G10, который в некоторых ситуациях способен заменить робота. Новинка одинаково хорошо и чистит ковры и моет твердые напольные покрытия. Ее можно купить в дополнение к роботу-пылесосу для уборки недоступных или опасных для него мест (например, лестниц).
*Все цены актуальны на момент публикации статьи
✔ ИТОГО
Xiaomi не перестаёт удивлять своих поклонников, и всех тех, кто любит качественную, а главное умную технику для дома. В систему умный дом, кроме роутера, очистителей воды и умных LED ламп выпустила домашнего помощника, который призван соблюдать чистоту в доме, при этом управлять им можно не только по расписанию, а со смартфона находясь в любой части мира, нужен только интернет. Что отличает его от более дешёвых конкурентов типа пылесосов Ilife? Ответ тут однозначный, умная уборка (робот пылесос благодаря четырёх ядерному процессору, 12 различным датчикам и лазерному дальномеру строит план квартиры, отмечает в мозгах (чипсет ARM Alwinner) пройденные участки, благодаря наличию ультразвуковых и лазерных сканеров может убирать на расстоянии 1 см от стены или преграды. Кроме этого обладает очень мощным мотором с силой всасывания 1800 Паскалей, что в два раза больше многих современных роботов пылесосов, и аккумулятором ёмкостью 5200 мАч, что позволяет ему убирать квартиру 2.5 часа, а если не хватит заряда вернуться на базу для подзарядки и потом продолжить с места где робот остановился. Полностью управляется с фирменного мобильного приложения, где можно увидеть весь пройденный путь пылесоса по квартире, посмотреть текущий статус работы или историю уборки квартиры. Товар предоставлен для написания обзора магазином. Обзор опубликован в соответствии с п.18 Правил сайта.





